
Design and Simulation Analysis of a Passive Energy Storage Assisted Lower Limb Exoskeleton System
-
摘要:
为了达到缓解人体行走时的关节压力、减轻关节负担和辅助人体行走的目的,基于人体行走原理提出了髋膝耦合被动式储能助力外骨骼设计方案。髋膝耦合机构用于实现膝关节的离散化助力,是以髋关节运动控制膝关节助力的离合控制方法。该文运用仿真和实验验证的方法验证了该外骨骼的有效性。运用Adams对人-机模型进行联合仿真,验证外骨骼对人体助力的理论效果。在实际穿戴实验中,通过对比是否穿戴外骨骼人体运动时的能耗来验证外骨骼的真实有效性。对比仿真与穿戴实验数据证明该外骨骼能够降低12%~13%的人体运动能耗。
Abstract:To achieve the purpose of relieving the joints pressure of human walking, reducing the joint burden and assisting human walking, this paper proposed a hip-knee coupling passive energy storage assistance exoskeleton design scheme based on the principle of human walking. The hip-knee coupling mechanism was used to achieve discrete knee joint assistance, which was a clutch control method to control knee joint assistance by hip joint motion. In this paper, the effectiveness of this exoskeleton was verified using simulation and experimental validation methods. First, a joint simulation of the human-machine model using Adams was used to verify the theoretical effect of the exoskeleton on the human body assistance. In the actual wearing experiment, the real effectiveness of the exoskeleton was verified by comparing the energy consumption during human movement with and without the exoskeleton. By comparing the simulated and wearing experimental data, it is approved that the exoskeleton can reduce the energy consumption of human movement by 12%-13%.
-
Keywords:
- passive /
- hip and knee coupling /
- energy storage /
- eoskeleton /
- Adams simulation /
- human energy consumption test
-
进入21世纪以后,外骨骼助力机器人作为一种人体辅助设备,在军用、民用等领域得到了空前的发展。外骨骼是绑缚在人体外侧并帮助人体行走的机械装置[1]。它能够承担人体负重,辅助人体运动,减轻关节负担,减少人体能量消耗。随着外骨骼在各个领域中的应用前景被发现,针对外骨骼的助力技术被给予了空前的关注,并取得了瞩目的成绩。
外骨骼技术的应用领域主要包括军事领域、医疗康复领域以及民用领域。美国研制的外骨骼多用于军事领域,譬如BLEEX[2-4]、XOS-1、XOS-2[5]、Soft Exosuit[6]外骨骼等等。日本研制的外骨骼多用于医疗康复领域,比如HAL系列外骨骼和ACSIVE。欧洲国家的外骨骼技术也相对先进,例如俄罗斯的“勇士-21”外骨骼、法国的“大力神”外骨骼和德国研制的“2Robo-Mate”机械外骨骼系统等等。国内相比于国外对外骨骼技术的研究相对较晚,但是也取得了不错的成绩,如电子科技大学的李星星研制的可穿戴式下肢康复机器人[7]、哈尔滨工业大学研制的液压驱动的外骨骼机器人、上海交通大学研制的床式康复型下肢外骨骼系统等等。
外骨骼根据有无外部能源驱动可分为主动式外骨骼和被动式外骨骼。主动式外骨骼依靠电机和液压等方式进行驱动,以实现增强人体关节力量或者辅助人体行走的作用。然而主动式外骨骼存在一系列的缺点:1) 电池寿命短,续航能力差,持续时长仅为30 min~2 h,液压系统容易漏油;2) 控制系统的参与使得整个外骨骼系统比较复杂,控制烦琐,控制精度要求高;3) 体积庞大,人体穿戴和脱卸不方便;4) 质量比较大,很容易对人体造成负担。
现有被动式外骨骼大多以支撑为设计目的,即可以将人体背负的负载通过外骨骼传递到地面从而减小人体负担,但是很少有能够收集人体浪费的能量帮助人体行走的功能。
本文提出一种被动式储能助力下肢外骨骼系统。该外骨骼系统没有控制系统的参与,不需要消耗外部电源能量,在运动过程中根据人体运动规律来储存和释放能量,实现对人体的助力功能。根据人体下肢运动特性完成外骨骼功能与结构设计,根据髋、膝关节角度规律设计了髋、膝关节的耦合功能,保证了髋、膝关节助力的协同型。在Adams软件中进行系统仿真,并进行人体穿戴实验,通过对比人体耗能来验证其助力效果。
1. 人体下肢解剖学和步态分析
外骨骼需要与人体高度耦合,其结构需要满足人体正常运动的需求,并且被动式外骨骼需要根据人体下肢运动特性来完成设计,需要对人体运动进行分析。
1.1 人体下肢运动范围
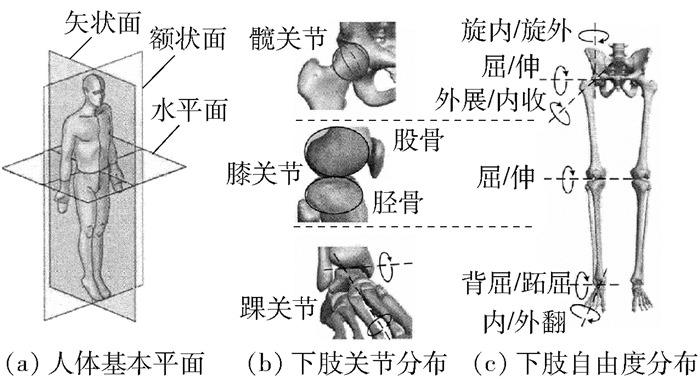
如图 1(a)所示,人体有3个相互垂直的基本面:矢状面、额状面和水平面[8]。
人体下肢的运动主要由髋关节、膝关节和踝关节的运动状态决定,如图 1(b)所示。髋关节处具有屈/伸、内收/外展和内旋/外旋3个自由度;膝关节处具有屈/伸1个自由度;踝关节处具有背屈/跖屈、内收/外展和内旋/外旋3个自由度。下肢单侧总共有6个自由度,3个关节的自由度分布如图 1(c)所示。其中,屈/伸是在矢状面内绕额状轴旋转的运动,内收/外展是在冠状面内绕着矢状轴旋转的运动,内旋/外旋是在水平面内绕着垂直轴旋转的运动。
表 1归纳了人体行走时下肢各关节的运动范围。
自由度(关节) 运动范围/(°) 旋内/旋外(髋) -50~40 屈/伸(髋) 120~-30 外展/内收(髋) -20~45 屈/伸(膝) 150~0 背屈/跖屈(踝) 20~-40 内/外翻(踝) 20~-35 1.2 人体步态分析
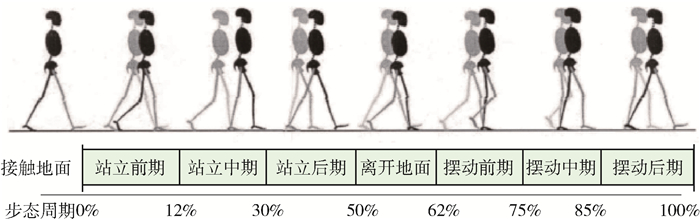
图 2所示为人体行走完整的一个步态,以右侧下肢为例,从足跟触地开始到同一足跟再次触地结束为一个步态周期。根据整个正常步态周期中的运动,一个步态周期可分为支撑期和摆动期,支撑期是指从足跟着地到足尖离地,即足底支撑面接触的时间,摆动期则是指从足尖离地到足跟着地,即足部离开支撑面的时间。支撑期阶段,人体将重量传递到地面,摆动期阶段人体单侧下肢离开地面,处于腾空状态。
2. 被动式储能助力下肢外骨骼设计
外骨骼需要与人体高度耦合,其结构需要满足人体正常运动的需求,因此需要根据人体下肢运动特性来完成设计。
从对人体下肢运动范围分析和步态的分析发现人体的主要运动和受力方向都集中在矢状面[9],因此本设计的外骨骼助力主要作用在矢状面。研究发现,在一个步态周期内髋关节角度与力矩之间呈现线性关系[10],膝关节在支撑期表现出角度和力矩几乎也为线性的关系[11]。另外,在整个步态周期内髋关节与膝关节角度曲线有一定的联系。基于这些规律设计了髋膝耦合的被动式储能助力下肢外骨骼系统,如图 3所示。
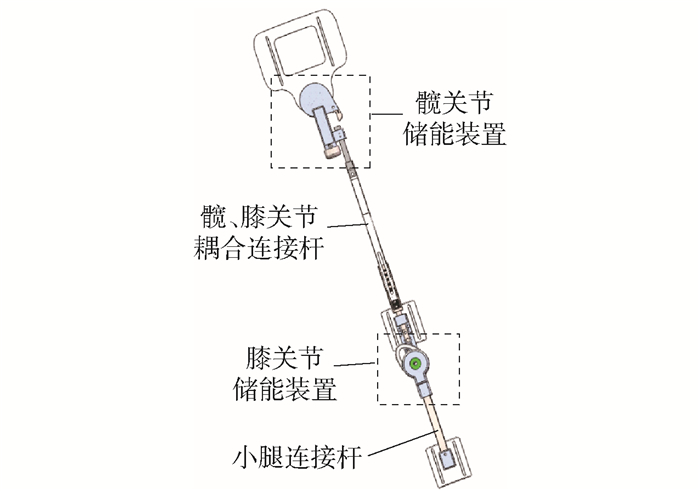
被动式储能助力下肢外骨骼系统有2个核心功能模块,分别是髋关节助力装置和膝关节助力装置。髋、膝关节耦合链接杆实现髋、膝关节助力装置联动——髋膝耦合功能。同时,为了适应不同人体身高的要求,髋、膝关节耦合连接杆具有可调节功能。
2.1 髋关节储能装置设计
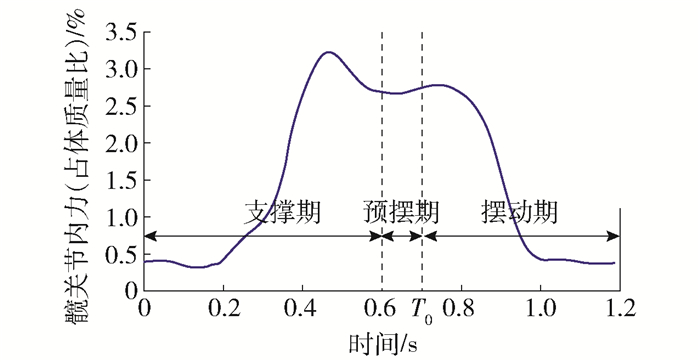
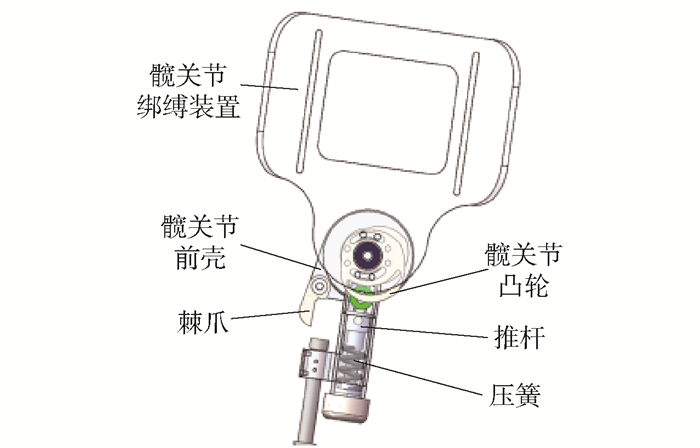
在一个完整步态周期内,髋关节角度和力矩之间呈近似线性关系,这个特性与压缩弹簧伸缩时力-位移特性类似[10]。根据CGA数据库相关数据得出的膝关节内力曲线如图 4所示。0~0.6 s时,人体处于支撑期;0.6~T0 s时,人体处于支撑期向摆动期过渡的预摆期;T0~1.2 s时,人体处于摆动期。T0这个时间节点作为人体预摆期与摆动期的分界点,在此刻之前完成能量的储存,之后进行能量的释放。基于以上研究,设计出基于凸轮推杆机构与压簧组合的髋关节助力装置,如图 5所示。
2.2 膝关节储能装置设计
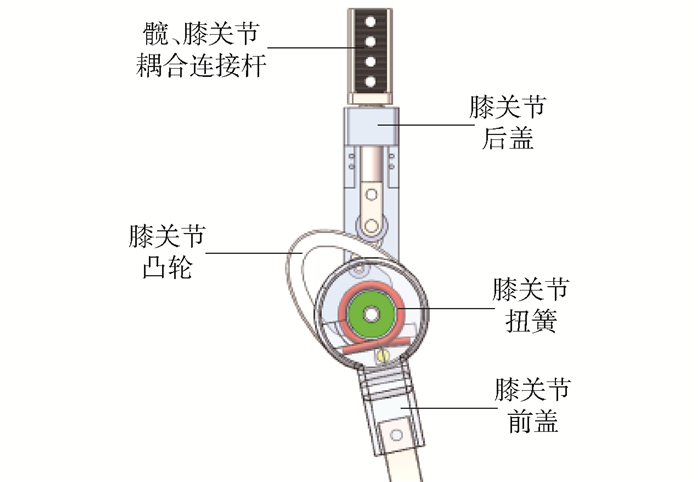
在一个步态周期内膝关节在重量支撑阶段表现出较大的力矩,而且膝关节在支撑期的角度和力矩几乎为线性的关系[11]。换言之在支撑期膝关节随着角度的增大力矩在变大,如图 6所示。这与扭转弹簧在储能过程的表现是一致的。而在摆动期就像扭转弹簧势能的过程。基于膝关节角度-力矩特性与扭转弹簧相似这一规律设计出基于“扭簧-凸轮”的膝关节助力装置,如图 7所示。
在支撑期前半段,髋、膝关节耦合连接杆锁紧膝关节凸轮,使膝关节助力装置工作。膝关节扭簧一段也因此被锁止,膝关节前盖在小腿角度变大过程中带动扭簧另一端实现能量储存;在支撑期后半段小腿角度减小,扭簧释放能量,帮助人体膝关节伸展,推动人往前运动。膝关节扭簧可以部分替代人体膝关节在支撑期的作用。
2.3 髋、膝关节的耦合关系
髋、膝关节储能机构的耦合关系是膝关节装置功能实现的保障,同时也是保证外骨骼不影响人体运动的前提。
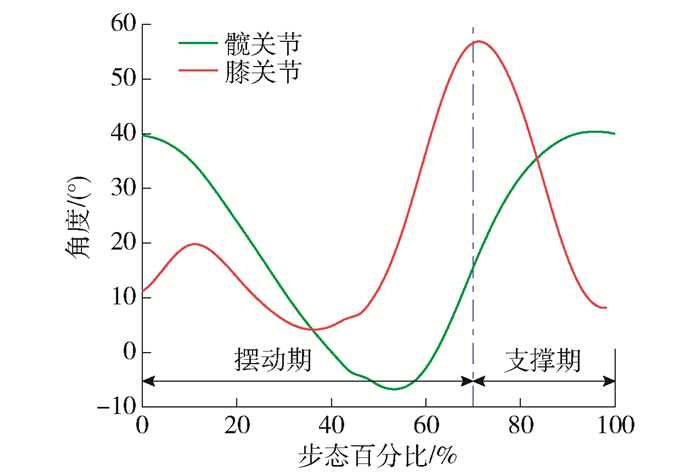
在1个步态周期内,髋关节的运动曲线只有1次波动,膝关节的运动曲线有2次波动,如图 8所示。髋关节在支撑期,随着大腿后摆角度逐渐减小,膝关节运动发生第1次角度变化。髋关节在摆动期,随着大腿向前摆角度逐渐增大,这时膝关节发生第2次角度变化。
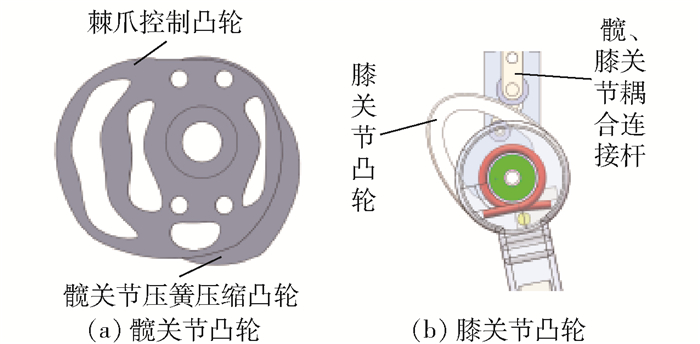
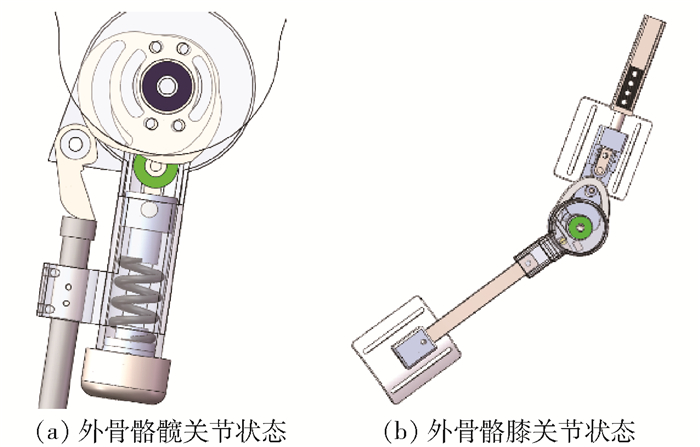
基于单个周期内髋关节和膝关节运动曲线的联系性,将大腿摆动的方向作为控制膝关节助力装置工作状态的切换信号。大腿向后摆动时,髋关节凸轮的棘爪控制凸轮(如图 9(a)所示)摩擦带动棘爪锁紧髋、膝关节耦合连接杆,致使膝关节凸轮(如图 9(b)所示)锁止,膝关节助力装置进入工作状态;大腿向前摆动时,髋关节凸轮的棘爪控制凸轮摩擦带动棘爪松开髋、膝关节耦合连接杆,这时膝关节凸轮可以转动,膝关节助力装置处于非工作状态。通过髋、膝关节助力装置的耦合可以保证膝关节助力装置在支撑期起到助力作用而在摆动期又不阻碍正常的运动。
2.4 总体助力思路设计
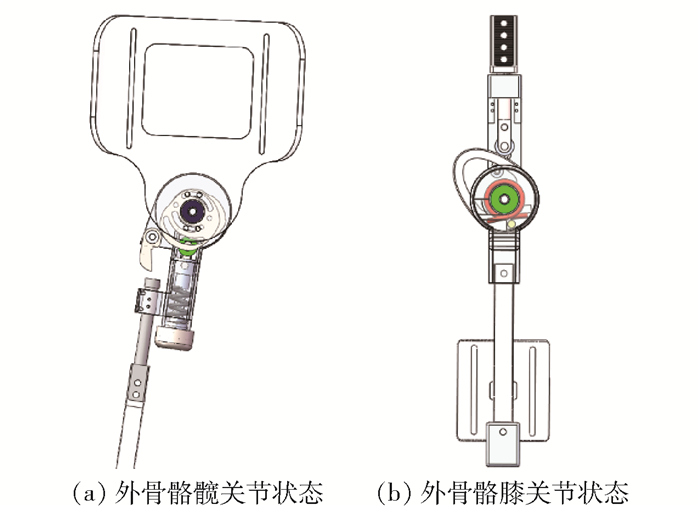
人站立初始时期,脚跟着地,人的大腿与躯干大约呈20°夹角,膝关节完全伸直。棘爪处于初始位置未发生偏转,如图 10所示。
人的大腿向后摆,棘爪控制凸轮与棘爪摩擦使棘爪偏转。同时,人体膝关节弯曲,引起髋、膝关节耦合连接杆向上移动,髋、膝关节耦合连接杆被棘爪锁死,膝关节助力装置进入工作状态,如图 11所示。随后膝关节完成弯曲和伸直动作,膝关节扭簧同步完成储能和释能过程,对膝关节的助力功能完成。
当膝关节伸直时,棘爪松开髋、膝关节耦合连接杆,膝关节助力装置进入非工作状态。棘爪在此时与髋关节凸轮处于不接触的状态,棘爪复位,回到图 11所示位置。
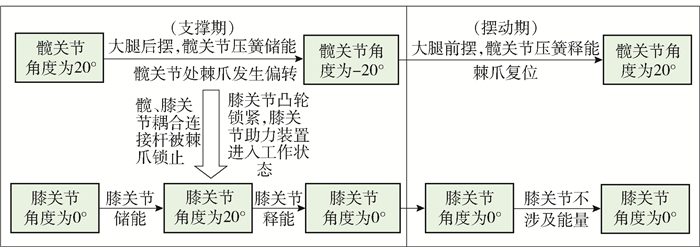
人的大腿向前摆,棘爪与髋关节凸轮重新摩擦帮助棘爪在初始位置保持不变。由于髋膝关节耦合连接杆与棘爪脱离,膝关节助力装置失效,人的膝关节自由弯曲,并不影响人的正常运动。总体的助力流程如图 12所示。
3. 人机仿真验证
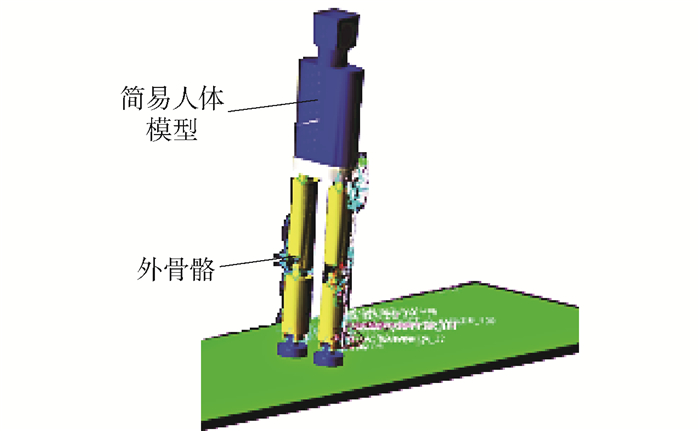
将建立的外骨骼模型和人体模型两者导入仿真软件Adams并对人-机模型进行碰撞力设置、约束设置和驱动设置。在腰部添加人与外骨骼连接的固定副[13],图 13为建立的人-机联合仿真模型。
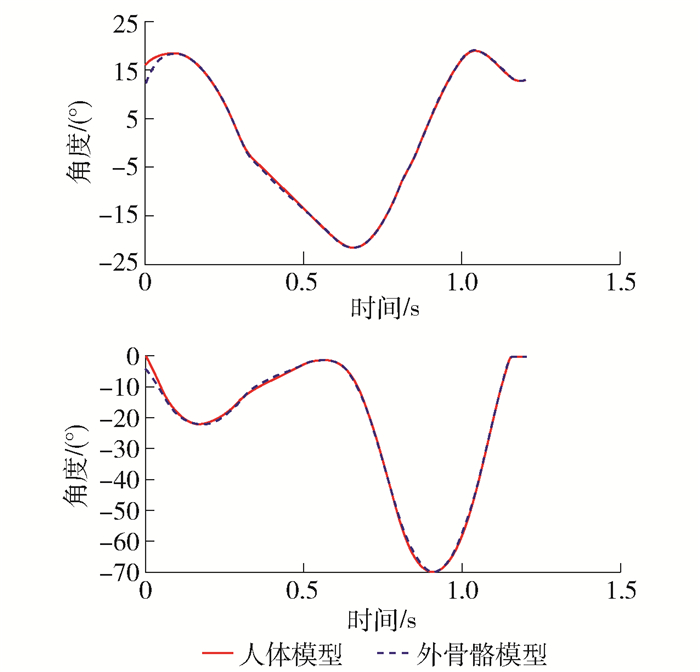
将CGA步态数据库提供的单个运动周期内髋关节、膝关节和踝关节运动曲线作为驱动输入到人体模型中,带动人体模型行走。由于外骨骼被动地跟随人体运动,所以对人体髋、膝关节运动曲线和外骨骼髋、膝关节运动曲线进行仿真对比,如图 14所示。红色实线代表人体模型运动曲线,蓝色虚线代表外骨骼模型运动曲线。可以看到,虽然存在偏差,但是整体比较吻合。在仿真初始时刻,人体与外骨骼的运动偏差较大。产生的原因是,人体和外骨骼的初始状态都为直立状态,仿真开始后,人体首先运动并立刻带动外骨骼跟随,外骨骼的状态突然由静止转变为运动,因此在初始时刻运动偏差较大,但在随后运动中两者轨迹基本保持一致,整体上外骨骼有很好的随动性。
![]() 图 14 人体模型与外骨骼模型运动对比曲线Figure 14. Motion comparison curves of human body model and exoskeleton model
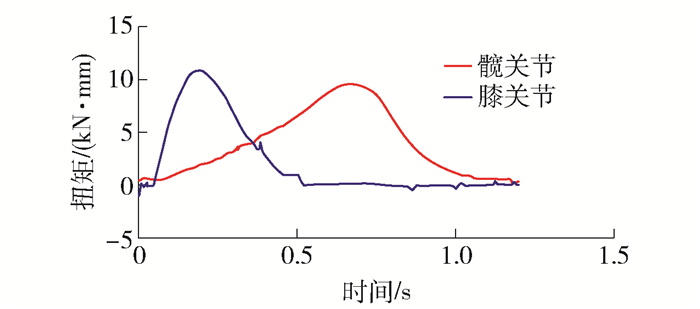
图 14 人体模型与外骨骼模型运动对比曲线Figure 14. Motion comparison curves of human body model and exoskeleton model为了验证髋、膝关节助力装置的工作状态,对髋、膝关节助力装置各自的储能元件进行了仿真分析。如图 15所示,可以看到,髋关节在0~0.66 s即支撑期内力矩一直增大,表明髋关节弹簧一直储能,0.66 s左右产生最大力矩9 800 N·mm,此时大腿后摆到最后位置。然后在摆动期内力矩逐渐变小,髋关节弹簧释放能量对大腿进行助力。膝关节扭簧在0~0.16 s即支撑期前半段内的扭矩一直增大,扭簧一直储能,0.16 s左右产生最大扭矩11 500 N·mm,这对应着膝关节弯曲到最大角度-24°的时刻,在0.16~0.50 s即支撑期后半段内扭簧释放能量对膝关节进行助力,在摆动期内扭矩为0,不干涉人体运动。
![]() 图 15 髋、膝关节助力装置储能元件扭矩分析Figure 15. Torque analysis of energy storage element of hip and knee assisting devices
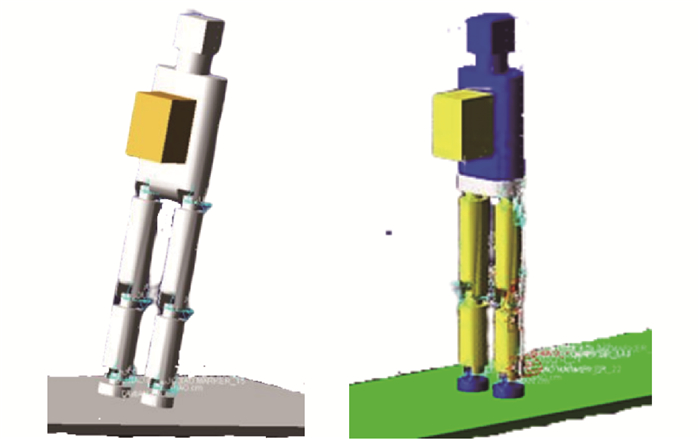
图 15 髋、膝关节助力装置储能元件扭矩分析Figure 15. Torque analysis of energy storage element of hip and knee assisting devices人体穿戴外骨骼运动能减小人体负重时额外需求的能量消耗,外骨骼的助力效果可以通过整个运动过程的人体能耗等参数来体现[12],而人体行走过程中的主要能耗集中在下肢的各个关节。由于外骨骼对髋关节和膝关节进行助力,通过对比分析“人体背负负载行走”和“人体穿戴外骨骼背负负载行走”2种行走模式下的髋、膝关节能耗等指标,验证外骨骼的助力效果。在Adams中进行2组仿真对比实验,负载的质量分别设置为30、40 kg,如图 16所示。本文仅针对人体右腿进行分析。
![]() 图 16 Adams环境下两种行走模式模型Figure 16. Model diagram of two walking modes in Adams environment
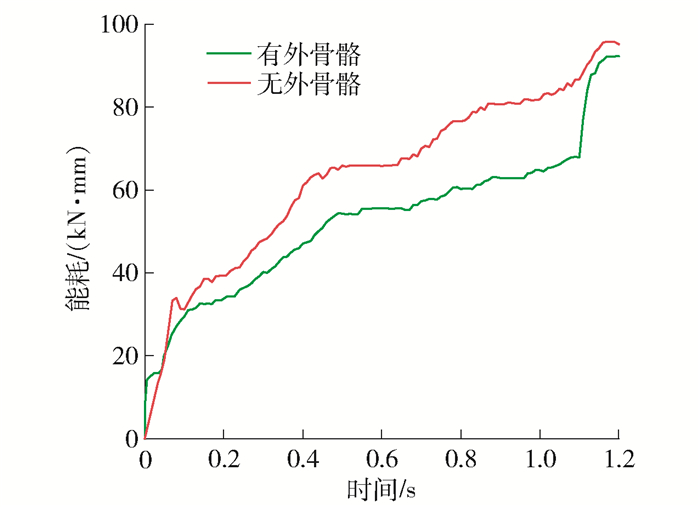
图 16 Adams环境下两种行走模式模型Figure 16. Model diagram of two walking modes in Adams environment仿真得到人体在2种不同运动模式下背负不同负载时髋关节和膝关节的能耗结果,如图 17~20所示。
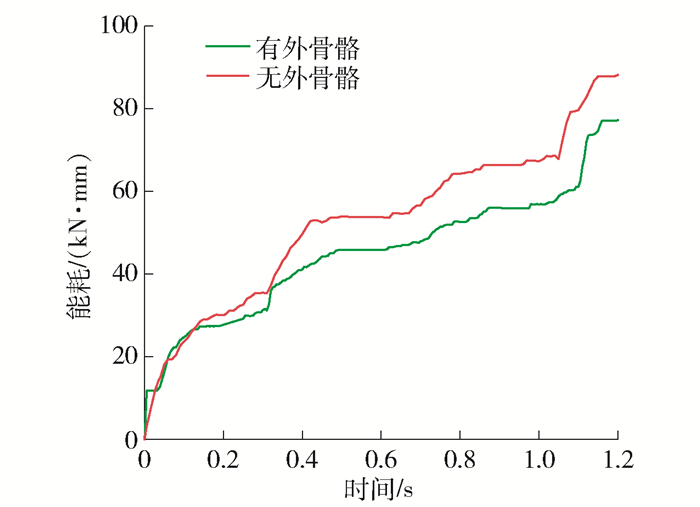
![]() 图 17 人体背负30 kg负载行走膝关节能耗有无外骨骼对比Figure 17. Comparison of energy consumption of the knee joint with and without an exoskeleton in humans walking with a 30 kg load on their backs
图 17 人体背负30 kg负载行走膝关节能耗有无外骨骼对比Figure 17. Comparison of energy consumption of the knee joint with and without an exoskeleton in humans walking with a 30 kg load on their backs![]() 图 18 人体背负30 kg负载行走髋关节能耗有无外骨骼对比Figure 18. Comparison of energy consumption of the hip joint with and without an exoskeleton in humans walking with a 30 kg load on their backs
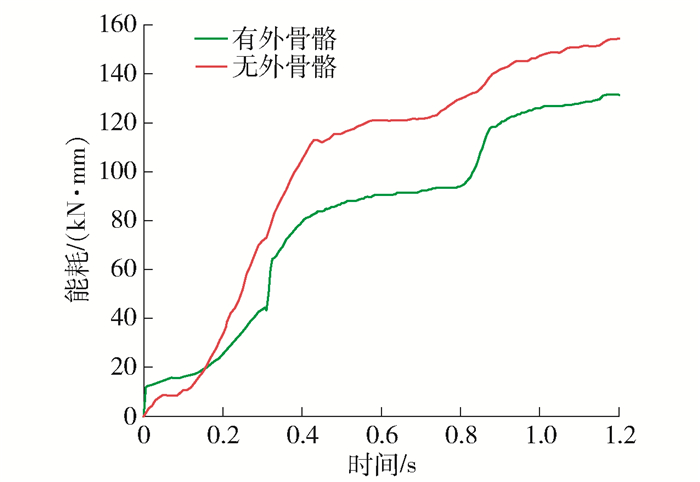
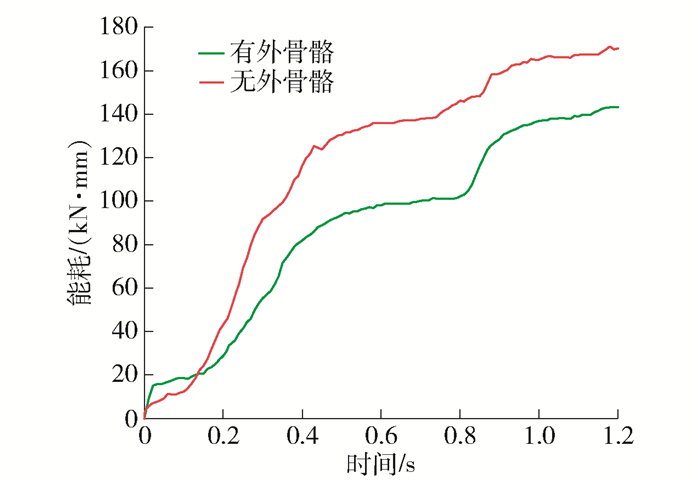
图 18 人体背负30 kg负载行走髋关节能耗有无外骨骼对比Figure 18. Comparison of energy consumption of the hip joint with and without an exoskeleton in humans walking with a 30 kg load on their backs![]() 图 19 人体背负40 kg负载行走膝关节能耗有无外骨骼对比Figure 19. Comparison of energy consumption of the knee joint with and without an exoskeleton in humans walking with a 40 kg load on their backs
图 19 人体背负40 kg负载行走膝关节能耗有无外骨骼对比Figure 19. Comparison of energy consumption of the knee joint with and without an exoskeleton in humans walking with a 40 kg load on their backs![]() 图 20 人体背负40 kg负载行走髋关节能耗有无外骨骼对比Figure 20. Comparison of energy consumption of the hip joint with and without an exoskeleton in humans walking with a 40 kg load on their backs
图 20 人体背负40 kg负载行走髋关节能耗有无外骨骼对比Figure 20. Comparison of energy consumption of the hip joint with and without an exoskeleton in humans walking with a 40 kg load on their backs由图 17~20可知,在背负30 kg负载的情况下,“人体背负负载行走”和“人体穿戴外骨骼背负负载行走”2种行走模式下的髋、膝关节能耗总和分别是243.2、212.7 J,穿戴外骨骼能帮助人体髋、膝关节节省能耗12.5%;在背负40 kg负载的情况下,2种行走模式下的髋、膝关节能耗总和分别是270.1、235.5 J,穿戴外骨骼能帮助人体髋、膝关节节省能耗12.81%。因此,可以得出人体穿戴外骨骼背负负载行走要比人体直接背负负载行走节省人体髋、膝关节能耗12%~13%。
4. 外骨骼实验分析
目前该外骨骼已经完成了样机制造,并针对加工好的外骨骼进行实际穿戴测试,测试了其功能以及对人体助力效果。
4.1 髋膝耦合功能验证分析
髋、膝关节的耦合不仅保证了外骨骼系统的功能,也避免了外骨骼系统对人体的阻碍[14]。所以说髋、膝关节的耦合是整个外骨骼系统功能实现的关键。
在实际的穿戴过程中,采用不同人穿戴外骨骼进行髋膝耦合的功能验证。验证中发现髋关节助力装置与膝关节助力装置的关节转动顺畅,棘爪运行无故障,髋、膝关节联动杆无障碍,整套外骨骼穿戴与解脱比较方便,高度调节装置可以满足不同身高的穿戴者。同时,髋关节和膝关节的储能元件可以在合适的时机触发,能够感受到来自髋关节和膝关节的助力效果。同时不影响人体正常运动。具体的穿戴效果展示如图 21所示。
![]() 图 21 穿戴者穿戴外骨骼后运动步态演示Figure 21. Gait demonstration of wearer after wearing exoskeleton
图 21 穿戴者穿戴外骨骼后运动步态演示Figure 21. Gait demonstration of wearer after wearing exoskeleton4.2 外骨骼性能测试
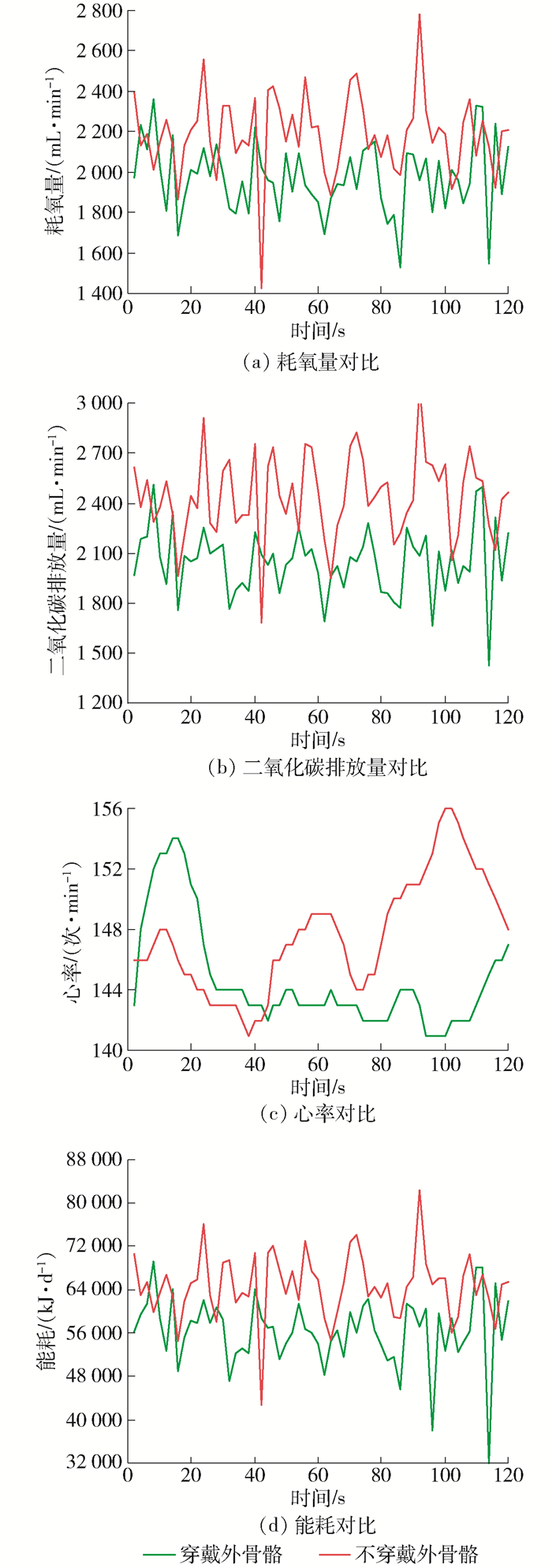
为了进一步评估骨骼的助力效果,2名测试者分别背负30、40 kg负载在穿戴外骨骼和不穿戴外骨骼2种情况下按固定节拍爬楼梯15 min,采集测试者的耗氧量、二氧化碳排放量、心率以及能耗等数据进行对比[15]。采集的器械选用的是呼吸代谢仪,该仪器可以实时采集人体的运动代谢数据,仪器佩戴效果如图 22所示。
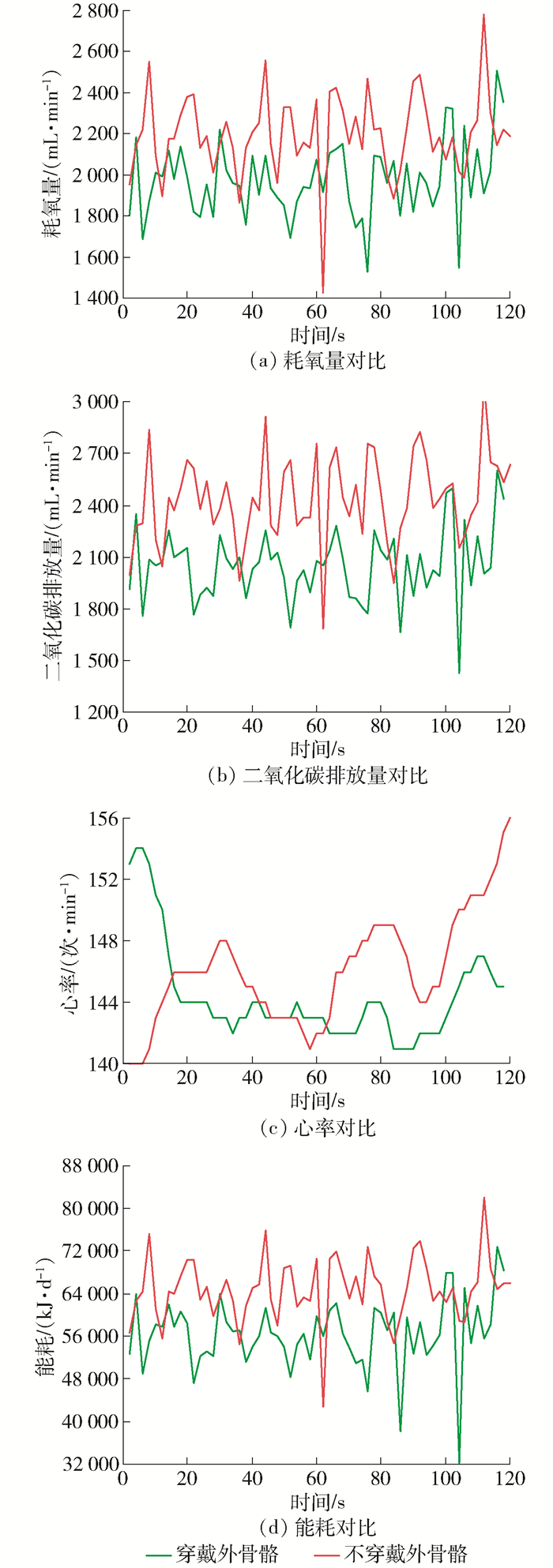
为了避免同一测试者连续实验会出现体力减小对实验数据的影响,本研究采用的方法为同一测试者穿戴外骨骼测试与不穿戴外骨骼测试之间间隔0.5 h,给予测试者一定的休息时间[16]。由于在运动初期与运动结束阶段体能差别也会对测试数据产生影响,为避免此影响,截取运动15 min之间数据较为稳定的2 min进行数据对比。实验结果如图 23、24所示。
通过实验数据分析得出测试者A背负30 kg的负载穿戴外骨骼比不穿戴外骨骼平均耗氧量降低了9.70%,平均二氧化碳排放量降低16.00%,平均心率降低了2.00%,平均能耗降低了12.75%;测试者B背负40 kg负载穿戴外骨骼比不穿戴外骨骼平均耗氧量降低了9.94%,平均二氧化碳排放量降低了15.53%,平均心率降低了1.36%,平均能耗降低了12.60%。
能耗是衡量人体运动能量消耗的直接表现,因此能耗降低能够直接反映出外骨骼对人体助力的效果。综合2名测试者的数据,穿戴外骨骼比不穿戴外骨骼能够降低12.675%的能耗。这与仿真得出的数据相差不大。
综上数据,该外骨骼能减小人体运动能耗12.5%左右,可以有效助力人体运动。
5. 结论
1) 本文建立被动式储能助力下肢外骨骼结构,省去了外部电源,降低了系统复杂度。外骨骼质量轻,穿戴和脱卸方便。在髋关节完成一种基于“压簧-凸轮”的助力装置,在支撑期髋关节弹簧储存能量,并在随后的摆动期释放能量。在膝关节完成一种基于“扭簧-凸轮”的助力装置,在支撑期膝关节扭簧储存和释放能量,并在摆动期不干涉人体的正常运动。
2) 通过仿真可以看出,外骨骼有着很好的随动性,外骨骼的髋、膝关节助力装置在合适的时间进行储能和释能,能对人体进行助力,并不干涉人体的运动。
3) 通过Adams对人体在2种行走模式下的能量消耗参数进行对比,验证了穿戴外骨骼对人体的能耗有降低效果。
4) 通过人体穿戴实验在2种负载情况下的能量消耗数据对比,验证了外骨骼能够有效降低人体的能耗。
5) 该外骨骼系统的髋、膝关节耦合功能易受步速的影响,在以后的研究工作中将进一步完善该功能,降低不同步速对该功能的影响。
-
![]()
图 14 人体模型与外骨骼模型运动对比曲线
Figure 14. Motion comparison curves of human body model and exoskeleton model
![]()
图 15 髋、膝关节助力装置储能元件扭矩分析
Figure 15. Torque analysis of energy storage element of hip and knee assisting devices
![]()
图 16 Adams环境下两种行走模式模型
Figure 16. Model diagram of two walking modes in Adams environment
![]()
图 17 人体背负30 kg负载行走膝关节能耗有无外骨骼对比
Figure 17. Comparison of energy consumption of the knee joint with and without an exoskeleton in humans walking with a 30 kg load on their backs
![]()
图 18 人体背负30 kg负载行走髋关节能耗有无外骨骼对比
Figure 18. Comparison of energy consumption of the hip joint with and without an exoskeleton in humans walking with a 30 kg load on their backs
![]()
图 19 人体背负40 kg负载行走膝关节能耗有无外骨骼对比
Figure 19. Comparison of energy consumption of the knee joint with and without an exoskeleton in humans walking with a 40 kg load on their backs
![]()
图 20 人体背负40 kg负载行走髋关节能耗有无外骨骼对比
Figure 20. Comparison of energy consumption of the hip joint with and without an exoskeleton in humans walking with a 40 kg load on their backs
![]()
图 21 穿戴者穿戴外骨骼后运动步态演示
Figure 21. Gait demonstration of wearer after wearing exoskeleton
-
[1] 陈梁军, 孔令成, 王玉成, 等. 人体步态分析与负重外骨骼机器人的动力学仿真[J]. 科学技术与工程, 2016, 16(27): 45-49. https://www.cnki.com.cn/Article/CJFDTOTAL-KXJS201627008.htm CHEN L J, KONG L C, WANG Y C, et al. Human gait analysis and load-exoskeleton robot dynamic simulation[J]. Science Technology and Engineering, 2016, 16(27): 45-49. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KXJS201627008.htm
[2] ZOSS A, KAZEROONI H, CHU A. On the mechanical design of the Berkeley lower extremity exoskeleton (BLEEX)[C]// 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE, 2005: 3465-3472.
[3] KAZEROONI H, RACINE J L, HUANG L, et al. On the control of the Berkeley lower extremity exoskeleton (BLEEX)[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE, 2005: 4353-4360.
[4] ZOSS A B, KAZEROONI H, CHU A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX)[J]. IEEE/ASME Transactions on Mechatronics, 2006, 11(2): 128-138. doi: 10.1109/TMECH.2006.871087
[5] KARLIN S. Raiding iron man's closet [Geek Life][J]. Spectrum IEEE, 2011, 48(8): 25-26. doi: 10.1109/MSPEC.2011.5960158
[6] ASBECK A T, KAI S, WALSH C J. Soft exosuit for hip assistance[J]. Robotics & Autonomous Systems, 2015, 73: 102-110.
[7] 李星星. 可穿戴式下肢康复机器人控制系统的设计[D]. 成都: 电子科技大学, 2013. LI X X. Design of wearable lower limb rehabilitation robot control system [D]. Chengdu: University of Electronic Science and Technology, 2013. (in Chinese)
[8] 尹军茂. 穿戴式下肢外骨骼机构分析与设计[D]. 北京: 北京工业大学, 2010. YIN J M. Analysis and design of wearable lower limb exoskeleton mechanism [D]. Beijing: Beijing University of Technology, 2010. (in Chinese)
[9] 刘来运, 樊军. 农用下肢外骨骼机构设计及仿真分析[J]. 机床与液压, 2017, 45(17): 15-19. https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201717006.htm LIU L Y, FAN J. Design and simulation analysis of agricultural lower limb exoskeleton mechanism [J]. Machine Tools and Hydraulics, 2017, 45(17): 15-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201717006.htm
[10] 刘刚, 黄新燕, 朱丽, 等. 人体髋关节助力外骨骼的设计[J]. 机床与液压, 2016, 44(3): 1-4. https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201603001.htm LIU G, HUANG X Y, ZHU L, et al. Design of human hip joint assisted exoskeleton [J]. Machine Tools and Hydraulics, 2016, 44(3): 1-4. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201603001.htm
[11] SHAMAEI K, DOLLAR A M. On the mechanics of the knee during the stance phase of the gait[C]// IEEE International Conference on Rehabilitation Robotics. Piscataway, NJ: IEEE, 2011: 12-17.
[12] 李杨. 助力型人体下肢外骨骼理论分析与实验研究[D]. 南京: 南京理工大学, 2017. LI Y. Theoretical analysis and experimental study on the power assisted human lower limb exoskeleton [D]. Nanjing: Nanjing University of Technology, 2017. (in Chinese)
[13] LI B, YUAN B, CHEN J, et al. Mechanical design and human-machine coupling dynamic analysis of a lower extremity exoskeleton[C]// International Conference on Intelligent Robotics and Applications. Berlin: Springer, 2017: 593-604.
[14] LEE K M, WANG D H, JI J J. Design of a passive gait-based lower-extremity-exoskeleton for supporting bodyweight[C]//International Conference on Intelligent Robotics and Applications. Berlin: Springer, 2015: 23-34.
[15] WANG D H, LEE K M, JI J J. A passive gait-based weight-support lower extremity eoskeleton with compliant joints[J]. IEEE Trans on Robotics, 2016, 32(4): 933-942. doi: 10.1109/TRO.2016.2572692
[16] 刘家伦, 周世通, 刘宏伟, 等. 膝关节外骨骼综合测试系统设计与实现[J]. 计算机测量与控制, 2021(12): 029. https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK202112006.htm LIU J L, ZHOU S T, LIU H W, et al. Design and implementation of a comprehensive testing system for exoskeleton of knee joint [J]. Computer Measurement and Control, 2021(12): 029. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK202112006.htm
-
期刊类型引用(0)
其他类型引用(1)
 下载:
下载:



计量
- 文章访问数: 282
- HTML全文浏览量: 39
- PDF下载量: 107
- 被引次数: 1
