
Impact Evaluation Method of Eco-driving Static Training of Professional Drivers Based on Kirkpatrick's Four-level Training Evaluation Mode
-
摘要:
以探究生态驾驶行为的一般性评估方法为目的,设计生态驾驶行为静态培训有效性评估实验,采用柯氏层次评估模型对数据建模,通过对比分析主客观数据,形成对培训效果在反应、学习、行为、效果各层面上的一般性评估方法,指导培训过程中的优化.结果表明:静态培训在各层面上均有改善,可以提高驾驶员的积极性与生态性,降低环境污染,提升经济效益,为生态驾驶培训的应用与推广奠定基础.
Abstract:To assess the effects of eco-driving, the operation method of eco-driving behaviors was learned by taxi drivers by watching the video, and the evaluation method used in the study was the Kirkpatrick's four-level training evaluation model. Based on the comparative analysis of subjective and objective data, a general evaluation method for the training effect at different levels (reaction, learning, behavior and effect) was established to optimize the training process. Results show that static training can improve the driver's enthusiasm and awareness of ecology, reduce environmental pollution, and improve economic efficiency. It lays the foundation for the promotion of eco-driving behavior in eco-driving simulator training.
-
交通领域的能耗排放问题是影响城市综合发展和居民健康水平的世界性难题[1].特别是将机动车排放与普遍存在的雾霾天气直接关联,更加凸显了交通领域能耗排放问题的严峻性和急迫性.据统计,截至2016年,北京市交通领域能源消耗量占全市能耗总量的18.9%,机动车排放的PM2.5、NOx和VOC分别占全市排放物总量的22.2%、58.0%和40.0%[2].为此,国务院印发《“十三五”节能减排综合方案》要求提高交通运输工具能效水平,到2020年乘用车平均燃料消耗量降至百公里5 L[3].可见,交通领域的节能减排问题亟待解决.
实际上,影响机动车能耗排放的主要因素包括车辆技术、道路环境及汽车运用水平三大方面,其中汽车运用水平是保障车辆燃料经济性的主要源泉之一.不同的驾驶水平与习惯对汽车燃料经济性的影响范围可达30%[4],即使是专业驾驶员因驾驶习惯也可导致2%~12%的燃油差异[4],不良的驾驶习惯将抹杀多种车辆技术进步措施产生的节油效果.同时,为了缓解交通领域的能源消耗问题,多种节能减排措施相继实施,如推广生态驾驶行为、改进车辆技术、设计车辆流线型、开发汽车新能源、调整出行结构等[5].相比之下推广生态驾驶行为具有低成本、零顾虑的优势.鉴于生态驾驶行为习惯对机动车能耗排放的贡献比例与优势,欧盟早在10年前便提出“生态驾驶行为”理念.生态驾驶行为是指驾驶员在驾驶过程中及时换挡、保持平稳行驶速度、预测前方交通流状态及信号变化情况,最大限度地避免突然加减速和长时间怠速等微观行为,以达到节能减排的目的[4].同时西方国家经验显示,评估3年周期后,生态驾驶可使油耗平均降低5%~10%,优异者甚至可达20%~50%,同时还可减少汽车排放10%[6].
源于显著的节能减排潜力,生态驾驶行为受到越来越多的青睐,对生态驾驶行为的培训及评估逐渐成为发展生态驾驶行为的趋势,合理评估其效果对推广生态驾驶培训十分重要.目前,国内外的培训主要包括静态培训方式与动态培训方式2种.静态培训主要借鉴沿袭传统培训方式,培训内容分为理论培训和实操培训.理论培训分为静态图片与动画模拟2种方式,培训场所包括室内培训和室外培训,技术支撑包括驾驶模拟技术和场地实车操作.动态培训,主要基于车载设备感知信息,动态反馈驾驶员的驾驶行为特性.反馈方式主要包括视觉、听觉和触觉3种[7].辅助设备形式主要借助汽车仪表盘、智能手机终端、离线反馈系统、专用成套车载装置和触觉反馈踏板等车载终端[8].由于驾驶行为特征描述、判别和诊断研究的制约,目前的矫正优化内容和方法较为粗糙,针对性不强,定性化为主.国内外多选用燃油消耗量、污染物排放量等单一指标量化评估生态驾驶行为的培训效果,忽视培训的潜在隐性效果,制约培训的发展与推广.如Barkenbus[9]利用CO2评价生态驾驶行为的效果并且认为采用生态驾驶培训能够有效缓解气候变化. Zarkadoula等[10]利用燃油消耗降低量评估生态驾驶培训效果并认为生态驾驶行为能够提升4.35%的燃油消耗.伍毅平[11]基于驾驶模拟技术以油耗节约量为指标评估生态驾驶行为培训的测试效果.上述研究均选用单一指标评估生态驾驶行为的培训效果.赵晓华等[12]基于北京市出租车实车运行数据,以油耗特征分析北京市快速路基本路段在不同交通、工况条件下生态驾驶行为的节能潜力,该研究虽考虑交通条件及工况影响但仍选用单一指标评估生态驾驶行为的培训效果.纵观国内外对生态驾驶行为培训效果的研究,多选用单一评估指标,且尚未形成系统的生态驾驶行为效果评估方法,同时未对指标选取及评估方法制定相关标准.因此,对于生态驾驶行为的培训评估方法应用,有必要寻求新的评估方法体系,从而实现对生态驾驶行为培训效果的精准、全面、系统评估.
基于此,论文提出面向生态驾驶行为培训效果的“全面化-多层次”的评估方法.研究基于驾驶模拟技术设计生态驾驶行为静态培训的有效性评估实验,考虑反应、学习、行为、效果等不同效果层面,采用柯氏层次评估模型,评估生态驾驶行为培训的潜在隐性效果,构建生态驾驶行为培训的一般性评估模型.将柯氏层次评估模型引入微观驾驶行为研究领域,进而推演形成评估驾驶行为培训的反应、学习、行为、效果等层面的一般性评估方法,为生态驾驶行为的推广与应用奠定理论及数据基础.
1. 有效性评估实验设计
相比生态驾驶行为动态培训,通过观看教学视频的静态培训方式具有方便、适用性广等优势,是一种适合大规模推广与应用的驾驶行为培训方式.作者开展生态驾驶行为静态培训实验并验证其培训效果,研究过程如下.
1.1 被试选取
出租车驾驶员的平均驾驶行程可达社会人士的6~8倍,故研究招募出租车驾驶员作为实验被试.由于部分被试出现模拟器眩晕的情况,最终35名被试完成实验,鉴于出租车驾驶员多为男性,故在随机抽取的实验被试中,男女比例为34:1,被试的年龄范围为27~55岁,平均年龄44岁,年龄标准差7.60;驾龄范围4~31年,平均驾龄19年,驾龄标准差6.30,所有被试人员的驾驶经验丰富,身体状况良好.
1.2 实验设备
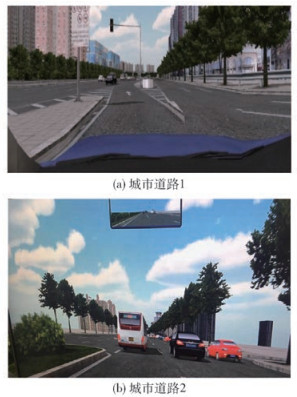
选用驾驶模拟器作为实验设备,见图 1.实验设备主要由模拟驾驶舱位、多屏显示及声响系统、运动力学采集控制系统、数据采集分析系统、人机交互系统、视景系统构成.模拟器提供32 in(1 in=2.5 cm)三面屏监视器,画面逼真可以模拟实车运行环境;声响系统模拟汽车发动机转速、车辆制动、转弯等声音;模拟系统可建立与实际驾驶环境一致的虚拟场景模型,提供真实的行车感受.可采集速度、加速度、运行方向、挡位、油门、刹车等17项指标,采集频率60 Hz.
1.3 场景设计
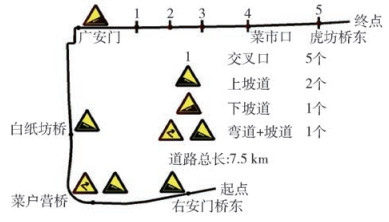
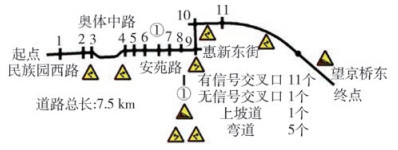
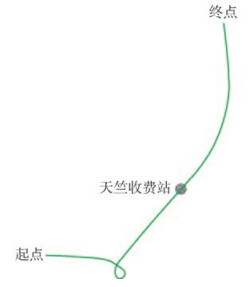
为了涵盖典型道路类型,实验场景包含城市道路、高速公路及山区道路共3种典型道路类型.其中,城市道路场景选取城市道路2条,总长均为7.5 km,车道宽度3.5 m,双向2车道,均包含直线路段、交叉口、坡道、弯道等道路类型.山区高速公路1条,总长15.0 km,由高速公路与山区道路共同构成,其中高速公路全长3.0 km,车道宽度3.5 m,双向5车道,包含收费站1个;设计山区道路全长12.0 km,设计车道宽度3.5 m,双向单车道,包含直线路段、坡道、弯道等道路类型. 3个场景内均包含起步、减速停车、匀速、上下坡、通过弯道、怠速停车等多种驾驶工况.由于能耗排放受交通流影响较大,实验场景中设计基本畅通状态的单一交通流,在驾驶员模拟驾驶中可产生正常驾驶、跟车、超车等事件组合以模拟驾驶员的日常驾驶特性.同时,为了保证实验质量,设计一个练习场景供驾驶员在正式实验前试驾,场景中不设计交通条件及道路工况.实验场景路线见图 2~5,场景搭建详情见表 1,实验场景及练习场景见图 6,城市道路场景见图 7,山区高速公路场景见图 8.
表 1 场景搭建详情Table 1. Details of setting up scenarios路段选取 物理特性 事件设计 城市道路1 北京市西南二环(右安门桥东—菜户营桥—白纸坊桥—广安门—菜市口—虎坊桥东) 快速路+普通道路全长7.5 km 交叉口5个
坡道3个
带坡弯道1个城市道路2 北京市北四环(民族园西路—奥体中路—安苑路—惠新东街—望和桥—望京桥东) 快速路+普通道路全长7.5 km 无信号交叉口1个
信号交叉口11个
坡道1个
弯道3个山区高速公路 高速公路 首都机场高速(开发街/林荫路路口—机场高速—天竺收费站—机场华谊桥) 全长3.0 km 收费站1个 山区道路 依据《公路工程技术标准》JTGB01—2014、《公路路线设计规范》JTGD20—2006、《公路路基设计规范》JTGD30—2015设计 全长12.0 km 坡道6个(上下坡),坡度分为1%、3%、5%
弯道6个(左右转),弯道半径分别为100、500、800 m1.4 静态培训内容制作
作者对生态驾驶行为静态培训模式进行设计,培训模式以驾驶员综合教育目标模型(goals of driver education model,GDE)框架为设计基础,通过多层次培训驾驶员的生态驾驶行为,GDE框架将培训内容分为个人生活目标及生存技能、驾驶环境与目标、交通环境把控、车辆操作技能4个等级.研究依据GDE模式制作生态驾驶行为静态培训视频,详情见表 2.
表 2 视频内容Table 2. Video contentGDE框架 培训内容 个人生活目标及生存技能(一般性) 培养驾驶员对生态驾驶的社会及个人利益的普遍认识
了解低排放车辆技术驾驶环境与目标(行程相关) 驾驶前的准备工作
使用可替代的交通方式
避免短途行程
提前计划最短路线
避免高峰出行
检查轮胎
减少不必要的车辆载重
油量加到合适用量
在拥堵时熄火
关闭窗户减少阻力
关闭空调交通环境把控 适当观察
预期计划
留有反应时间与空间
遵守交通限速
避免常停车启动
操作时避免增加发动机转速车辆操作技能 平缓加速
提前换挡保持低转速
控制合适的转数
保持平稳速度
平缓刹车1.5 静态培训流程
生态驾驶行为静态培训主要包括5个部分,如下.
1) 静态培训前的问卷调查及知识评测
驾驶员填写问卷记录个人信息、精神状态等,评测被试对于生态驾驶行为的知识水平及了解程度.
2) 静态培训前的模拟驾驶
驾驶员需完成城市道路与山区高速公路2个场景的驾驶,由于2条城市道路的道路类型相似,为避免疲劳驾驶,随机抽选城市道路1、2中的一个场景作为城市道路实验场景进行测试.驾驶员在练习场景中充分试驾后,按其自然驾驶习惯驾驶2个实验场景,根据驾驶模拟器的提示分别完成城市道路、山区高速公路的驾驶任务.
3) 静态视频培训
驾驶完成后每位驾驶员在驾驶模拟器屏幕上观看并学习相同内容的生态驾驶行为培训视频.
4) 静态培训后的模拟驾驶
驾驶员经静态培训后,按当前所掌握的技能进行自然驾驶,完成与2)中完全相同的城市道路、山区高速公路的驾驶任务.
5) 静态培训后的问卷调查及知识评测
驾驶员经培训后完成与静态培训前相同的评测试卷,填写培训满意度、模拟真实度、学习与应用等问卷.
2. 静态培训效果评估方法
2.1 柯氏层次评估模型
培训效果的评估历经了定性评估至定量评估的发展,其中影响最大、最广泛的是柯氏层次评估模型[13-14].该模型将培训效果的评估标准分为反应、学习、行为、效果4个递进层次,评估4个层次的培训效果.其中,反应层通过对培训效果及有用性的反应,关注参与者对培训的直接感受;学习层关注参与者在培训后对培训内容的知识、技能、态度等的理解和掌握程度;行为层关注参与者经培训后对自身行为的变化及培训中知识、技巧的运用程度;效果层关注培训所带来的成效与变化.
2.2 生态驾驶行为静态培训效果评价
研究选用柯氏层次评估模型,基于反应、学习、行为、效果4个层次评估生态驾驶静态培训效果.各级评估指标如表 3所示,一级指标4项,对应反应、学习、行为、效果4个层次,其中二级、三级指标分别表征与具化一级指标.作者探究适用于不同道路条件下的效果评估模型,故将不同场景下数据汇总进行效果分析,以探究此次生态驾驶行为静态培训的效果.形成一套模型效果全面、指标评估精准、评估体系系统的全链条、一般性评估体系.
表 3 各层评估指标Table 3. Evaluation indicators of each layer一级指标 二级指标 三级指标 A反应层 A1培训主观反应 A11生态驾驶的燃油帮助 A12采取生态驾驶程度 A2场景真实度 A21模拟器评分 B学习层 B1学习程度 B11生态驾驶测试得分 C行为层 C1客观反应 C11非生态驾驶行为频次 D效果层 D1经济效益 D11百公里油耗 D2生态环境 D21百公里排放 2.2.1 反应层
反应层是评估驾驶员对培训的满意程度、积极程度的重要工具,用来描述驾驶员对培训的整体反应.采用驾驶员对培训的主观反应(A1)与场景的真实程度(A2)描述该指标.研究通过问卷调查的方法评价生态驾驶行为静态培训内容、效果、设施等满意度(满分10分),利用分值划分表征静态培训在反应层的影响效果.其中A1、A2指标的问卷设计题为:问题A:生态驾驶静态培训对您生态行为的提升程度.问题B:以后日常驾车中会坚持采取学到的生态驾驶行为.问题C:结合日常驾车的感受,综合评价模拟器油门、方向盘、刹车、离合、场景真实感、速度感的真实度分值.分值划分规划见表 4.
表 4 分值对应表Table 4. Score analysis table分值 符合程度 分值 符合程度 9~10 非常好、非常符合 3~5 差、不符合 7~9 好、符合 1~3 非常差、非常不符合 5~7 一般 图 9为问卷统计问题的分值与表 4对应,结果表明,问题A“生态驾驶静态培训对您生态行为的提升程度”与C“结合日常驾车的感受,综合评价模拟器油门、方向盘、刹车、离合、场景真实感、速度感的真实度分值”的分值均对应“好、符合”,即模拟器的真实度可以模拟自然驾驶时真实水平,驾驶员认为静态培训在很大程度上可以改善其驾驶行为;问题B“以后日常驾车中会坚持采取学到的生态驾驶行为”的分值对应“非常符合”,即在静态培训后驾驶员可以学习到生态驾驶行为相关知识并可以用于指导驾驶员的日后驾驶.
2.2.2 学习层
学习层的评估通过纵向对比培训前后驾驶员的知识水平,用于描述驾驶员对培训中的学习程度(B1),利用驾驶员对静态培训中生态知识的认知程度表征该指标.通过试卷测试的方式,借助驾驶员静态培训前后的相同试卷得分评价培训在学习层面的影响.测试试卷设计见表 5.培训前后试卷分值显著性结果表明培训对分数产生显著影响(F(1, 69)=18.788,P<0.001),见表 6.结果表明静态培训后驾驶员对生态驾驶知识的测试得分有显著提升,生态驾驶行为静态培训可以明显提升驾驶员的生态驾驶行为理论知识水平.
表 5 试卷设计Table 5. Test paper design测试类型 考察点 分值 总分 选择题 生态驾驶基本操作 5 25 节能减排常识 填空题 生态驾驶操作规范 10 50 判断题 驾驶行为影响因素 5 25 生态驾驶综合操作 表 6 试卷得分Table 6. Grading of test测试组 分数 提升比例/% 基础测试 45.57 培训后测试 60.29 32.3 2.2.3 行为层
行为层评估借助行为指标考察静态培训后驾驶员接受知识、技能的应用与转化程度,用于表征静态培训对驾驶行为生态性的客观反应(C1).对比静态培训前后驾驶员的非生态(不良)驾驶行为频次.
2.2.3.1 行为指标提取
选取急加速、急减速、急刹车、低挡高速作为评价指标,其中急加速、急减速各分为3个严重阶段,共8个非生态驾驶行为发生频次,各指标定义如下.
1) 急加速:将模拟器产生的加速度绝对值从小至大排序,85%、90%、95%位加速度数值即为急加速1、2、3共3个阶段的阈值.
2) 急减速:将模拟器产生的减速度绝对值从小至大排序,85%、90%、95%位减速度数值即为急减速1、2、3共3个阶段的阈值.
3) 急刹车:将模拟器产生的减速度绝对值从小至大排序,85%位减速度为急刹车阈值.
4) 低挡高速:根据驾校教练驾驶经验,挡位为1、2、3、4时的车速范围应为10~20 km/h、20~30 km/h、30~40 km/h、40~50 km/h.
为了剔除异常数据,作者在指标提取时引入“时间阈值”概念,即指标发生的持续时间大于等于阈值时则判定行为发生,否则数据无效.由小至大取15%位指标发生持续时长为时间判定阈值,即85%的指标发生持续时间大于该阈值.
综上,非生态驾驶行为指标判定条件见表 7,其中a为加速度,v为速度,vs为终止速度,d为挡位,t为时间.
表 7 非生态驾驶行为判定条件Table 7. Determination of non-ecological driving behavior行为指标 判定条件 阈值范围 持续时间 急加速1 1 m/s2<a≤1.3 m/s2 急加速2 1.3 m/s2<a≤1.9 m/s2 急加速3 a>1.9 m/s4 急减速1 -0.75 m/s2>a≥-1.1 m/s2
vs≠0急减速2 -1.1 m/s2>a≥-2.1 m/s2
vs≠0t≥1 s 急减速3 a<-2.1 m/s2
vs≠0急刹车 a<-0.75 m/s2
vs=0低挡高速 d=1, v>20 km/h d=2, v>30 km/h d=3, v>40 km/h d=4, v>50 km/h 2.2.3.2 基于非生态驾驶行为频次的行为层评估
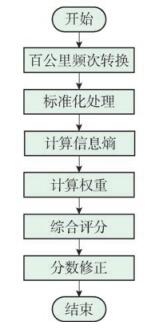
熵权法是一种客观赋权方法,用于度量信息论中的信息量[15-17].按照信息论基本原理的解释,信息是系统有序程度的一个度量,熵是系统无序程度的一个度量.利用熵权法评估驾驶行为的非生态性,评估流程如图 10所示.
1) 百公里频次:由于不同驾驶员所驾驶不同的场景,不同驾驶场景间里程数存在一定差异,为了实现数据一致性与可比性,对非生态驾驶行为指标取百公里频次,计算公式为
$$ 百公里频次 = 场景发生频次 \div {\rm{场景里程数 }} \times 100 $$ (1) 2) 将8个指标的数据进行标准化处理:定义8个指标分别为X1, X2, …, X8,其中Xi={Xi1, Xi2, …, Xi70}. 35名驾驶员8项指标标准化为Y1, Y2, …, Y8, 则Yij=Xij-minXi/maxXi-minXi,其中i=1, 2, …, 8;j=1, 2, …, 70.
3) 计算各指标的信息熵:定义信息熵为E1, E2, …, E8,根据信息论中信息熵的定义,一组数据的信息熵为$ {E_i} = - \ln {\left( n \right)^{ - 1}}\sum\limits_{j = 1}^{70} {\ln {p_{ij}}} $;其中$ {p_{ij}} = {Y_{ij}}/\sum\limits_{j = 1}^{70} {{Y_{ij}}} $,若pij=0,则定义$ \mathop {\lim }\limits_{{p_{ij}} \to 0} {p_{ij}}\ln {p_{ij}} = 0 $.
4) 计算各指标的权重:计算出各指标的信息熵为E1, E2, …, E8,通过信息熵计算权重为$ {W_i} = \frac{{1 - {E_i}}}{{8 - \sum {{E_i}} }} $.信息熵与权重值见表 8.
表 8 信息熵与权重值Table 8. Information entropy value and weight指标 X1 X2 X3 X4 X5 X6 X7 X8 信息熵 0.968 0.956 0.923 0.952 0.948 0.935 0.916 0.951 权重 0.071 4 0.098 7 0.171 1 0.107 1 0.114 3 0.144 1 0.185 8 0.107 5 5) 综合评分:定义Zj为8项指标综合得分, $ {Z_j} = \sum\limits_{i = 1}^8 {{X_{ij}}{W_i}} $.
6) 分数修正:由于驾驶员的生态性随不良驾驶行为随频次的增加而降低,故论文设分值随指标频次增加而降低,故修正分数为$ {Z'_j}, {Z'_j} = \frac{1}{{{Z_j}}} $.
驾驶行为生态性的变化通过静态培训前后平均分数表征,分值见表 9.结果表明静态培训可以降低非生态驾驶行为的发生频次,生态性提升比例为3%左右.
表 9 生态性变化Table 9. Ecological changes测试组 分数 提升比例/% 基础测试 6.222 静态培训后测试 8.092 3.01 2.2.4 效果层
效果层评估是指培训在自我的提升基础上,将对外界产生积极影响,描述驾驶员静态培训后所带来的经济(D1)及生态环境(D2)效益.其中百公里燃油消耗量与百公里排放量分别表征培训后的经济和生态环境效益.
利用VSP模型将环境指标、经济效益采用车辆百公里污染物排放及百公里油耗进行测算. VSP是单位质量机动车瞬时功率,表示发动克服车轮旋转阻力FR、空气动力学阻力FA做功、增加机动车动能EK、势能PK所输出的功率和内摩擦阻力FI造成的转动系的机械损失功率.其数值与车辆自身(质量、挡风面积等)、行驶环境(海拔、坡度等)、行驶状态(速度、加速度等)计算式为
$$ \begin{array}{c} {\rm{VSP = }}\left[ {\frac{{{\rm{d}}\left( {{E_{\rm{K}}} + {P_{\rm{E}}}} \right)}}{{{\rm{d}}t}} + {F_{\rm{R}}}v + {F_{\rm{I}}}v} \right]/m = \\ v\left[ {a\left( {a + \varepsilon } \right) + g\sin \theta + g{C_{\rm{R}}}} \right] + \\ 0.5{p_{\rm{a}}}\frac{{{C_{\rm{D}}}A}}{m}{\left( {v + {v_{\rm{m}}}} \right)^2} + {C_{\rm{I}}}gv \end{array} $$ (2) 式中:v为逐秒的运行速度,m/s;a为加速度,m/s2;ε为质量因子,量纲为一;θ为道路坡度,量纲为一;g为重力加速度,取9.81 m/s2;CR为滚动阻力系数,量纲为一;PE为环境空气密度,kg/s3;CD是风阻系数,量纲为一;A为车辆挡风面积,m2;m为车辆的质量,kg;vm为风速,m/s;CI为内摩擦阻力系数,量纲为一.
由于研究车型为固定车型,因此在计算VSP时,车辆因素为常量.同时,暂不考虑海拔高度和道路坡度等外界因素的影响.伍毅平等[18]研究的VSP排放模型根据车辆速度、加速度的关系计算车辆尾气排放量VSP.本论文应用该模型下VSP区间的基准排放率[18]测算尾气排放,利用碳平衡反推汽车油耗FC[19],公式为
$$ \begin{array}{c} {\rm{VSP = 0}}{\rm{.105}}\;{\rm{802v + 0}}{\rm{.001}}\;{\rm{353}}\;{\rm{73}}{v^2}{\rm{ + }}\\ {\rm{0}}{\rm{.000}}\;{\rm{333}}\;{\rm{11}}{v^3} + va \end{array} $$ (3) $$ \begin{array}{c} {\rm{FC = }}\left( {0.866{M_{{\rm{HC}}}} + 0.428\;6{M_{{\rm{CO}}}} + } \right.\\ \left. {0.272\;7{M_{{\rm{C}}{{\rm{O}}_2}}}} \right) \times 0.156 \end{array} $$ (4) 式中MCO、MCO2、MHC分别为CO、CO2、HC的排放量,单位为g/km.
计算培训前后百公里油耗及排放,见表 10.对百公里油耗显著性分析结果表明,培训具有显著效果(F(1,69)=4.201,P<0.005).静态培训可显著影响车辆油耗量,对尾气排放产生积极影响.油耗下降3.78%,排放下降4.71%~9.97%.
表 10 排放与油耗值Table 10. Emissions and fuel consumption项目 CO2 CO HC NOx 油耗 基础测试 2 449.3 5.401 0.578 0.369 9.567 培训后测试 2 323.7 4.918 0.551 0.332 9.205 降低比例/% 5.13 8.93 4.71 9.97 3.78 3. 结论
1) 论文设计生态驾驶行为静态培训有效性评估实验,采用柯氏层次评估模型评估培训效果,利用驾驶员对生态驾驶行为的态度、生态驾驶行为相关知识的掌握、驾驶行为生态性、产生的油耗与排放分别表征反应、学习、行为、效果各个层面,结果表明,经生态驾驶行为静态培训后,驾驶员更倾向于采取生态驾驶行为且其生态驾驶行为的知识水平在培训后有较好的提高,可以对驾驶员的生态驾驶行为理论知识水平产生积极作用.同时,驾驶员的行为生态性有明显提升,其油耗、排放水平明显下降,表明静态培训可以提升行为的生态性,同时对经济效益与环境效益有积极的作用.生态驾驶行为静态培训可在4个层面中均产生积极的效果培训,且模型具有系统性、一般性的评价特点.
2) 针对评估指标多样的特性,论文不同于以往研究中油耗、排放的单一项指标分析,选取贯穿培训过程中的多个指标,构成一般性、全链条的评估指标体系.
3) 目前,本文仅评估针对职业司机的静态培训效果,未来将探究全国不同类型驾驶员的培训效果作进一步效果研究.同时,柯氏层次评估模型也可应用于其他培训类型如安全、继续教育等全交通领域的效果评估,形成基于不同层面的柯氏评估一般性方法,评估驾驶行为培训的潜在隐性效果,构建面向交通领域驾驶行为培训效果的“全面化-多层次”评估模型,形成一套精准、全面、系统的评估体系.
-
表 1 场景搭建详情
Table 1 Details of setting up scenarios
路段选取 物理特性 事件设计 城市道路1 北京市西南二环(右安门桥东—菜户营桥—白纸坊桥—广安门—菜市口—虎坊桥东) 快速路+普通道路全长7.5 km 交叉口5个
坡道3个
带坡弯道1个城市道路2 北京市北四环(民族园西路—奥体中路—安苑路—惠新东街—望和桥—望京桥东) 快速路+普通道路全长7.5 km 无信号交叉口1个
信号交叉口11个
坡道1个
弯道3个山区高速公路 高速公路 首都机场高速(开发街/林荫路路口—机场高速—天竺收费站—机场华谊桥) 全长3.0 km 收费站1个 山区道路 依据《公路工程技术标准》JTGB01—2014、《公路路线设计规范》JTGD20—2006、《公路路基设计规范》JTGD30—2015设计 全长12.0 km 坡道6个(上下坡),坡度分为1%、3%、5%
弯道6个(左右转),弯道半径分别为100、500、800 m 下载: 导出CSV
下载: 导出CSV
表 2 视频内容
Table 2 Video content
GDE框架 培训内容 个人生活目标及生存技能(一般性) 培养驾驶员对生态驾驶的社会及个人利益的普遍认识
了解低排放车辆技术驾驶环境与目标(行程相关) 驾驶前的准备工作
使用可替代的交通方式
避免短途行程
提前计划最短路线
避免高峰出行
检查轮胎
减少不必要的车辆载重
油量加到合适用量
在拥堵时熄火
关闭窗户减少阻力
关闭空调交通环境把控 适当观察
预期计划
留有反应时间与空间
遵守交通限速
避免常停车启动
操作时避免增加发动机转速车辆操作技能 平缓加速
提前换挡保持低转速
控制合适的转数
保持平稳速度
平缓刹车
下载: 导出CSV
表 3 各层评估指标
Table 3 Evaluation indicators of each layer
一级指标 二级指标 三级指标 A反应层 A1培训主观反应 A11生态驾驶的燃油帮助 A12采取生态驾驶程度 A2场景真实度 A21模拟器评分 B学习层 B1学习程度 B11生态驾驶测试得分 C行为层 C1客观反应 C11非生态驾驶行为频次 D效果层 D1经济效益 D11百公里油耗 D2生态环境 D21百公里排放
下载: 导出CSV
表 4 分值对应表
Table 4 Score analysis table
分值 符合程度 分值 符合程度 9~10 非常好、非常符合 3~5 差、不符合 7~9 好、符合 1~3 非常差、非常不符合 5~7 一般
下载: 导出CSV
表 5 试卷设计
Table 5 Test paper design
测试类型 考察点 分值 总分 选择题 生态驾驶基本操作 5 25 节能减排常识 填空题 生态驾驶操作规范 10 50 判断题 驾驶行为影响因素 5 25 生态驾驶综合操作
下载: 导出CSV
表 7 非生态驾驶行为判定条件
Table 7 Determination of non-ecological driving behavior
行为指标 判定条件 阈值范围 持续时间 急加速1 1 m/s2<a≤1.3 m/s2 急加速2 1.3 m/s2<a≤1.9 m/s2 急加速3 a>1.9 m/s4 急减速1 -0.75 m/s2>a≥-1.1 m/s2
vs≠0急减速2 -1.1 m/s2>a≥-2.1 m/s2
vs≠0t≥1 s 急减速3 a<-2.1 m/s2
vs≠0急刹车 a<-0.75 m/s2
vs=0低挡高速 d=1, v>20 km/h d=2, v>30 km/h d=3, v>40 km/h d=4, v>50 km/h
下载: 导出CSV
表 8 信息熵与权重值
Table 8 Information entropy value and weight
指标 X1 X2 X3 X4 X5 X6 X7 X8 信息熵 0.968 0.956 0.923 0.952 0.948 0.935 0.916 0.951 权重 0.071 4 0.098 7 0.171 1 0.107 1 0.114 3 0.144 1 0.185 8 0.107 5
下载: 导出CSV
表 10 排放与油耗值
Table 10 Emissions and fuel consumption
项目 CO2 CO HC NOx 油耗 基础测试 2 449.3 5.401 0.578 0.369 9.567 培训后测试 2 323.7 4.918 0.551 0.332 9.205 降低比例/% 5.13 8.93 4.71 9.97 3.78
下载: 导出CSV
-
[1] DAVIES N J, WESTON R. Reducing car-use for leisure:Can organised walking groups switch from car travel to bus and train walks?[J]. Journal of Transport Geography, 2015, 48:23-29. doi: 10.1016/j.jtrangeo.2015.08.009
[2] 中华人民共和国交通运输部. 2016年交通运输行业发展统计公报[R/OL].(2017-04-17)[2019-01-26]. http://zizhan.mot.gov.cn/zfxxgk/bnssj/zhghs/201704/t20170417_2191106.html. [3] 国务院.国务院关于印发"十三五"节能减排综合工作方案的通知[EB/OL].(2017-01-05)[2019-01-26]. http://www.gov.cn/zhengce/content/2017-01/05/content_5156789.html. [4] MARTIN E, CHAN N D, SHAHEEN S A. Understanding how ecodriving public education can result in reduced fuel use and greenhouse gas emissions[C/OL]//The 91th Annual Meeting of Transportation Research Board. Washington, D.C.: Transportation Research Board, 2012: 163-173[2019-01-26]. https://www.researchgate.net/publication/265890447_UNDERSTANDING_HOW_ECODRIVING_PUBLIC_EDUCATION_CAN_RESULT_IN_REDUCED_FUEL_USE_AND_GREENHOUSE_GAS_EMISSIONS.
[5] 白崤.汽车驾驶节能技术研究[D].西安: 长安大学, 2011. BAI X. Research on driving energy-saving technology[D]. Xi'an: Chang'an University, 2011. (in Chinese)
[6] BARTH M, BORIBOOMSOMSIN K. Energy and emissions impacts of a freeway-based dynamic eco-driving system[J]. Transportation Research:Part D, 2009, 14(6) 400-410. doi: 10.1016/j.trd.2009.01.004
[7] AZZI S, REYMOND G, MÉRIENNE F, et al. Eco-driving performance assessment with in-car visual and haptic feedback assistance[J]. Journal of Computing and Information Science in Engineering, 2011, 11(4):041005-1-041005-5. doi: 10.1115/1.3622753
[8] GONDER J, EARLEYWINE M, SPARKS W. Final report on the fuel saving effectiveness of various driver feedback approaches[R]. Golden, USA: National Renewable Energy Lab, 2011.
[9] BARKENBUS J N. Eco-driving:an overlooked climate change initiative[J]. Energy Policy, 2010, 38(2):762-769. doi: 10.1016/j.enpol.2009.10.021
[10] ZARKADOULA M, ZOIDIS G, TRITOPOULOU E. Training urban bus drivers to promote smart driving:a note on a Greek eco-driving pilot program[J]. Transportation Research Part D:Transport and Environment, 2007, 12(6):449-451. doi: 10.1016/j.trd.2007.05.002
[11] 伍毅平.生态驾驶行为特征甄别及反馈优化方法研究[D].北京: 北京工业大学, 2017. WU Y P. Research on eco-driving behavior characteristics identification and feedback optimization method[D]. Beijing: Beijing University of Technology, 2017. (in Chinese)
[12] 赵晓华, 陈晨, 伍毅平, 等.出租车驾驶员驾驶行为对油耗的影响及潜力分析[J].交通运输系统工程与信息, 2015, 15(4):85-91. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jtysxtgcyxx201504013 ZHAO X H, CHEN C, WU Y P, et al. The effect and potential study of eco-driving on taxi fuel consumption[J]. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(4):85-91. (in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jtysxtgcyxx201504013
[13] KIRKPATRICK D L. Evaluating training programs:evidence vs proof[J]. Training and Development Journal, 1977, 31(11):9-12. http://eric.ed.gov/?id=ej169223
[14] KIRKPATRICK D L. Evaluating in-house training programs[J]. Training and Development Journal, 1978, 32(9):6-9. http://eric.ed.gov/?id=EJ191952
[15] 王清源, 旭海.熵权法在重大危险源应急救援评估中的应用[J].南京工业大学学报(自然科学版), 2011, 33(3):87-92. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=njhgdxxb201103019 WANG Q Y, XU H. Entropy method for major hazards emergency rescue[J]. Journal of Nanjing University of Technology (Natural Science Edition), 2011, 33(3):87-92. (in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=njhgdxxb201103019
[16] 郭亚东, 张培林.基于熵权-TOPSIS模型的LNG江海直达船型运输经济分析[J].物流技术, 2019, 38(3):57-60. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=wljs201903013 GUO Y D, ZHANG P L. Transportation economy analysis of river-to-sea LNG carrier based on entropy weight-TOPSIS model[J]. Logistics Technology, 2019, 38(3):57-60. (in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=wljs201903013
[17] 王欣.基于熵权模糊法的高校青年教师压力评价[J].微型电脑应用, 2019, 35(3):48-50. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=wxdnyy201903014 WANG X. Stress evaluation of young teachers in universities based on entropy weight and fuzzy method[J]. Microcomputer Applications, 2019, 35(3):48-50. (in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=wxdnyy201903014
[18] 伍毅平, 赵晓华, 荣建, 等.基于驾驶模拟实验的生态驾驶行为节能减排潜力[J].北京工业大学学报, 2015, 41(8):1214-1216. doi: 10.11936/bjutxb2014040076 WU Y P, ZHAO X H, RONG J, et al. Potential of eco-driving in reducing fuel consumption and emissions based on a driving simulator[J]. Journal of Beijing University of Technology, 2015, 41(8):1214-1216. (in Chinese) doi: 10.11936/bjutxb2014040076
[19] 张学敏, 葛蕴珊, 张昱, 等.利用碳平衡法进行汽车油耗测量的应用研究[J].车用发动机, 2005, 157(3):56-58. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cyfdj200503015 ZHANG X M, GE Y S, ZHANG Y, et al. Research on fuel consumption measurement using carbon balance method[J]. Vehicle Engine, 2005, 157(3):56-58. (in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cyfdj200503015
-
期刊类型引用(3)
1. 冯星,周开礼. 基于满意度的企业员工职业素养培训效果提升研究. 安徽工业大学学报(社会科学版). 2023(01): 19-22 .  百度学术
百度学术
2. 郭文锋. 电力企业员工培训效果多级别自动评估体系构建. 电工技术. 2023(18): 188-191+194 . 百度学术
3. 马大勇,李安卓. 基于数据挖掘的船舶虚拟驾驶效果评价. 舰船科学技术. 2022(18): 181-184 . 百度学术
其他类型引用(12)





计量
- 文章访问数: 240
- HTML全文浏览量: 15
- PDF下载量: 64
- 被引次数: 15
