
Visual Odometer Based on Attention and LSTM
-
摘要:
近年来通过利用视觉信息估计相机的位姿,实现对无人车的定位成为研究热点,视觉里程计是其中的重要组成部分.传统的视觉里程计需要复杂的流程如特征提取、特征匹配、后端优化,难以求解出最优情况.因此,提出融合注意力和长短时记忆网络的视觉里程计,通过注意力机制增强的卷积网络从帧间变化中提取运动特征,然后使用长短时记忆网络进行时序建模,输入RGB图片序列,模型端到端地输出位姿.在公开的无人驾驶KITTI数据集上完成实验,并与其他算法进行对比.结果表明,该方法在位姿估计上的误差低于其他单目算法,定性分析显示该算法具有较好的泛化能力.
Abstract:In recent years, the use of visual information to estimate the pose of the camera to realize the positioning of unmanned vehicles has become a research hotspot. Visual odometry is an important part of it. Traditional visual odometry requires complex processes such as feature extraction, feature matching, and post-processing. It is difficult to solve the optimal situation. Therefore, a visual odometer that combines attention and long short-term memory (LSTM) was proposed in this paper. The convolutional network was enhanced by the attention mechanism, which extracted motion features from the changes between frames. Then, the long and short-term memory network was used for timing modeling. The input was a sequence of RGB pictures, and a pose of end-to-end was output by the model. The experiment was completed on the public unmanned driving KITTI data set and compared with other algorithms. Results show that the error of the method in pose estimation is lower than that of other monocular algorithms, and through qualitative analysis, it has good generalization ability.
-
Keywords:
- deep learning /
- attention mechanism /
- sequence modeling /
- visual odometry /
- pose estimation /
- symmetric network
-
视觉里程计[1](visual odometry, VO)解决同时定位和地图构建中的定位问题,主要用来求解相机在未知环境中的位姿并绘制出相机运动的轨迹. 该技术被广泛应用于无人驾驶、机器人、潜航器等系统,是继惯性导航、车轮里程计等定位技术之后的一种新的导航技术. 视觉里程计利用相机捕获连续运动时间内的图片序列,然后通过算法计算出相邻图片间的运动关系,最终输出相机的相对姿态,其中包括旋转和平移信息,这一过程也被称为视觉位姿估计[2].
视觉里程计的早期研究是针对火星探索计划进行的,2004年Nister等提出并搭建了最早的VO系统,为后续的VO系统的研究提供了优秀的范例和参考. 视觉里程计可以分为单目、双目和深度(RGB-D)相机视觉里程计. 根据采用的求解方法又可以划分为基于间接法[3-4]和直接法[5-6]的视觉里程计. 间接方法在连续帧的匹配特征之间执行几何变换来计算相机运动的大致位姿,然后通过局部或全局的光束平差法(bundle adjustment, BA)进行位姿优化. 其中基于特征法的位姿估计充分利用了图片的几何信息,主要包含特征提取、特征匹配、误匹配剔除和运动估计等步骤. 而基于直接法的位姿估计使用了图片的光度信息,直接通过计算像素值来估计相机的运动. 但这些系统都存在一定的问题,直接法是基于相邻图片之间的灰度不变假设,然后再求解位姿,这种假设在面对光照变化明显的场景时难以成立,而特征点法只适用于具有明显特征的场景,当面对纹理单一、存在动态物体的场景时,难以提取有效的特征.
深度学习(deep learning)被广泛应用于目标检测、目标追踪等诸多计算机视觉领域[7-8]. 将其应用到同步定位与建图领域(simultaneous location and mapping, SLAM)也是目前国内外研究的趋势. Roberts等[9]将每个图片帧划分为网格单元并计算每个单元的光流,然后使用K近邻(K-nearest neighbors, KNN)算法来估计当前位姿的变化. 随后一些研究人员提出通过卷积神经网络(conventional neural network,CNN)从光流图片序列中估计相机运动位姿[10],例如PCNN VO[11]、Flow-odometry[12]、LS-V[13]等. CNN可以自动对图片进行不同尺度的特征提取,省去了传统方法中烦琐的特征提取过程. 但是,由于VO需要考虑连续图片序列之间的相关信息,需要处理和发现图片之间更多的低层几何变换信息,而长短时记忆(long short-term memory,LSTM)网络能实现这种时序上的关联. 综上所述,本文放弃传统复杂且基于一定条件的系统设计,采用深度学习构建端到端的模型,提出了一种融合注意力、卷积和长短时记忆网络的视觉里程计ALC-VO(attention LSTM CNN-visual odometry). 注意力机制能提高系统的特征提取能力,在CNN基础上增加通道注意力和空间注意力处理图片, 学习图片中的运动特征,而不是具体的语义信息. 而且视觉里程计本身是一种时序上对相机的位姿估计,通过LSTM自动学习图片间的关联,能够利用历史信息完成对当前位姿的有效估计. 为了充分利用已有的数据,将图片进行正序的训练,还将图片的逆序投入到神经网络中进行训练.
在公开数据集KITTI上进行实验,结果证明本文方法在位姿估计精度上优于传统的单目视觉里程计算法. 论文的具体结构如下:第1部分主要介绍本文所提出的模型. 第2部分给出了模型在无人驾驶KITTI数据集下的实验结果与分析. 第3部分得出结论,并对下一阶段的工作进行展望.
1. 模型设计
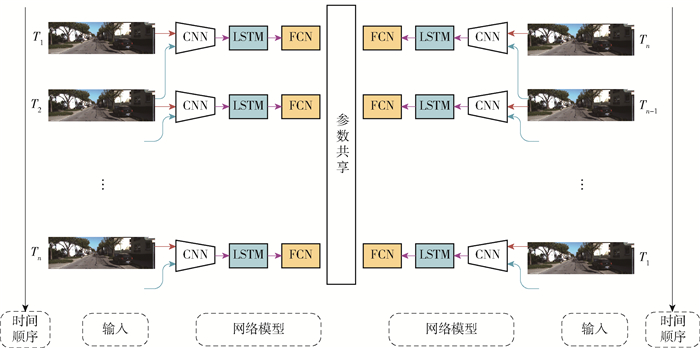
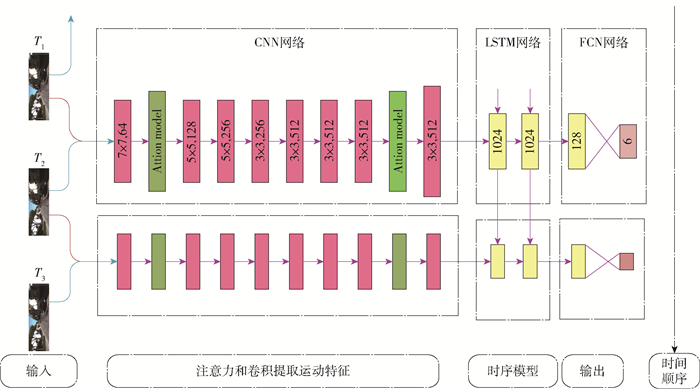
本文构建的视觉里程计模型ALC-VO的详细结构如图 1所示,ALC-VO结合CNN层、ATTENTION层、LSTM层,以图片序列为输入,首先使用融合了注意力机制的CNN提取相邻图片间的局部特征,然后利用LSTM时序建模,最后通过全连接层输出相机的相对位姿信息. 同时采用图 2的镜像网络,对模型进行正向和逆向的训练,正向和逆向的区别在于图片输入的顺序是否相反,在正常测试及验证模型的时候则不需要镜像网络.
1.1 基于CNN的运动特征提取
目前已经有很多网络能获取图片的语义信息,如VGG Net、Google Net等,然而它们主要用于分类或者目标检测等相关任务. 而相机位姿估计与图片分类任务区别很大,首先图片分类每次只需要提取一张图片的特征,而视觉里程计是通过2张图片来计算出相机的位姿,更依赖图片之间的几何特征信息,属于深度学习中的回归问题. 因此,采用诸如VGG Net结构来解决视觉里程计问题并不是最优选择. 而光流可以表示相邻时刻图片间的运动关系,所以本文参照了光流神经网络模型Flow-Net, 通过修改Flow-Net的子网络FlowNetSimple构建了ALC-VO中的CNN部分,用于提取图片运动特征.
网络的输入为相邻2帧的图片,2张图片均为数据集中的原始RGB图片,为了适应本文所提出的网络,将图片大小修改为1 280×384,并将2张图片进行第3维度上的串联,组成第3维度为6的数据并输入到网络中. 逐层学习图片运动特征的过程中,在每个卷积层之后添加批量归一化(batch normalization)[14],使得卷积变换前后数据分布保持不变. 完成相邻图片间的运动特征学习后,将最后一个卷积层输出的特征图输入到后面的LSTM. CNN的各层参数如表 1所示. 该CNN模型总共包含8个卷积层,其中第1个卷积层的卷积核大小为7×7,第2~4层的卷积核大小减小为5×5,后面4层的卷积核大小再次缩小到3×3.
表 1 CNN的各层参数Table 1. Parameters of each layer of CNN网络层 卷积核 步长 填充 通道数量 Conv_1 7×7 2 3 64 Conv_2 5×5 2 3 128 Conv_3 5×5 2 2 256 Conv_4 5×5 2 2 256 Conv_5 3×3 1 1 512 Conv_6 3×3 2 1 512 Conv_7 3×3 1 1 512 Conv_8 3×3 2 1 512 1.2 基于ConvLSTM的时序建模
LSTM网络十分适合处理时序数据问题,可以在计算下一时刻相邻图片间的运动关系时,提供之前时刻保留的位姿信息. 因为是图片数据,所以使用了卷积长短时记忆网络ConvLSTM[15]. ConvLSTM在LSTM结构的基础上进行了改进,将权重与输入层的全连接方式改为局部连接,通过卷积运算可以更好地学习图片的空间特征.
假设当前时刻为t,输入为Xt和上一时刻的隐藏状态Ht-1,则ConvLSTM输出及状态更新的计算式[15]为
$$ \begin{gathered} i_{t}=\sigma\left(W_{x i} * X_{t}+W_{h i} * H_{t-1}+W_{c i} \circ C_{t-1}+b_{i}\right) \\ f_{t}=\sigma\left(W_{x f} * X_{t}+W_{h f} * H_{t-1}+W_{c f} \circ C_{t-1}+b_{f}\right) \\ C_{t}=f_{t} \circ C_{t-1}+i_{t} \circ \tanh \left(W_{x c} * X_{t}+W_{h c} * H_{t-1}+b_{c}\right) \\ o_{t}=\sigma\left(W_{x o} * X_{t}+W_{h o} * H_{t-1}+W_{c o} \circ C_{t}+b_{o}\right) \\ H_{t}=o_{t} \circ \tanh C_{t} \end{gathered} $$ (1) 式中:σ为sigmoid激活函数;*为卷积运算;$\circ$为2个矩阵或向量对应元素相乘, 称为Hadamard乘积;it、ft、Ct、ot、Ht均为三维张量,其中1个维度是时间,其余2个分别是图像的长、宽.
ALC-VO中LSTM结构由2个ConvLSTM叠加构成,每个ConvLSTM层包含1 024个隐藏单元,卷积核大小为3×3. 其中第1个ConvLSTM层连接在卷积层conv_8之后,第2个ConvLSTM层连接在第1个ConvLSTM层之后,其输入为第1个ConvLSTM层的隐藏状态ht. 为了保持原始的数据分布,2个ConvLSTM层中使用的激活函数为ReLU. ALC-VO在第2个ConvLSTM层之后添加了2个全连接层,神经元个数分别为128和6,其中最后1个全连接层的输出为ALC-VO估计的相机相对位姿.
1.3 注意力机制
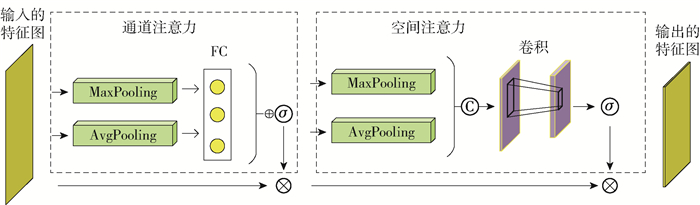
注意力模块可嵌入到卷积神经网络中进行一种简单而又有效的注意力机制部署. 其主要包含通道注意力模块及空间注意力模块. 通过使用注意力机制来增强网络架构的表达力,进一步表征出图片之间的几何关系变换,使得网络能够更加智能地学习到更重要的特征同时关注那些特征区域,并且减少学习一些不重要的特征,这也是注意力机制的本质所在,并将基于卷积的注意力模块集成到CNN网络架构中进行端到端的训练. 其基本结构如图 3所示. 主要对特征进行2个操作,公式为
$$ F^{\prime}=\sigma(\operatorname{MLP}(A P(F))+\operatorname{MLP}(\operatorname{MP}(F))) \odot F \\ F^{\prime \prime}=\sigma\left(f^{7 \times 7}\left[\mathrm{AP}\left(F^{\prime}\right), \operatorname{MP}\left(F^{\prime}\right)\right]\right) \odot F^{\prime} $$ (2) 式中:⊙为元素级乘法;F∈$\mathbb{R}$C×H×W为特征图;F′∈$\mathbb{R}$C×1×1为注意力模块推断出的一维通道域注意力特征;F″∈$\mathbb{R}$C×1×1为注意力模块推断出的二维空间域注意力特征;F′为中间输出;F″为最终的优化结果;σ为Sigmoid函数;f7×7表示7×7的卷积层;AP为平均池化;MP为最大池化;MLP为一个全连接层.
1.4 损失函数及优化
可以把视觉里程计估计问题看成一个条件概率问题,给定一个序列的n+1张图片:
$$ X=\left(X_{1}, X_{2}, \cdots, X_{n+1}\right) $$ (3) 计算得到该序列中两两相邻的图片之间的姿态:
$$ Y=\left(Y_{1}, Y_{2}, \cdots, Y_{n}\right) $$ (4) VO估计问题看成一个条件概率问题,在给定图片序列的情况下,计算位姿的概率表示为
$$ p(Y \mid X)=p\left(Y_{1}, Y_{2}, \cdots, Y_{n} \mid X_{1}, X_{2}, \cdots, X_{n+1}\right) $$ (5) 这里要解决的问题就是求解最优的网络参数w*使得式(5)中的概率最大化. 式(5)表示在给定图片序列(Y1, Y2, …, Yn)的情况下,估计相机的位置和姿态(X1, X2, …, Xn+1)是对整个视觉里程计任务的数学描述. 而在公式
$$ {w^*} = \mathop {\arg \max }\limits_w p(X\mid Y;w) $$ (6) 中增加网络参数w,是用神经网络处理视觉里程计这个任务的数学描述. 在给定图片序列(Y1, Y2, …, Yn)情况下,不同网络参数来估计位姿(X1, X2, …, Xn+1)会有不同的概率值. 优化算法需要寻找使其估计概率最大这一情况下的网络参数值,这代表整个网络达到最优状态.
图 2中左半部分和右半部的网络结构完全对称,图片序列按照时间顺序依次经过CNN层、LSTM层以及FCN层,输出相邻两帧之间的相对姿态. 右半部分和左半部分完全对称,只是图片序列采用逆序输入的方式,得到的输出也代表相邻两帧图片之间的相对姿态,不过是上一帧相对于当前帧的相对姿态. 误差为所有输出姿态的均方误差,表示为
$$ {\mathop{\rm Loss}\nolimits} = \frac{1}{N}\sum\limits_{i = 1}^N {\left\| {{P_{1i}} - {{\hat P}_{1i}}} \right\|_2^2} + {\beta _1}\left\| {{\mathit{\Phi }_{1i}} - {{\mathit{\hat \Phi }}_{1i}}} \right\|_2^2 + \\ \left\| {{P_{2j}} - {{\hat P}_{2j}}} \right\|_2^2 + {\beta _2}\left\| {{\mathit{\Phi }_{2j}} - {{\mathit{\hat \Phi }}_{2j}}} \right\|_2^2 $$ (7) 式中:${\hat P_{1i}}, {\mathit{\hat \Phi }_{1i}}$分别为第i对样本按正序输入的位移和转角;${\hat P_{2j}}, {\mathit{\hat \Phi }_{2j}}$分别为第j对样本按逆序输入的位移和转角;P1i、Φ1i,P2j、Φ2j分别为Ground Truth的位移和转角. β1、β2分别为正序输入和逆序输入的转角误差尺度因子.
2. 实验结果
本实验采用显卡Nvidia GeForce 2080ti来训练和测试模型,CPU为Intel至强E5-2673-V3. 在深度学习框架Pytorch下进行相关算法的设计. 使用Adam(adaptive moment estimation)优化器进行100个epoch的训练,并将学习率设置为10×10-2,同时引入Dropout和Early Stopping技术来防止模型过拟合. 神经网络输入预处理图片的大小为1 280×384,训练时采用2块上述GPU进行同时训练,训练1个epoch需要0.1 h左右.
2.1 实验数据集
KITTI Visual Odometry[16]是Geiger等开源的汽车驾驶数据集. 可广泛用于评估各种VO或者SLAM算法. KITTI数据集前11个序列信息如表 2所示.
表 2 KITTI数据集中序列00-10信息Table 2. Information of sequences 00-10 in KITTI序列 图片总数 图片尺寸 总长度/m 00 4 541 1 241×376 3 724 01 1 101 1 241×376 2 453 02 4 661 1 241×376 5 067 03 801 1 241×376 560 04 271 1 226×370 393 05 2 761 1 226×370 2 205 06 1 101 1 226×370 1 232 07 1 101 1 226×370 694 08 4 071 1 226×370 3 222 09 1 591 1 226×370 1 705 10 1 201 1 226×370 919 KITTI VO benchmark共包含有22个场景图片,每个场景都包含有双目摄像机拍摄的一系列的图片. 不过本文只使用双目数据集中的单目图片. 其中序列00—03的图片尺寸为1 241×376,序列04—10的图片尺寸1 226×370,为了符合网络对输入数据的要求,将所有图片的尺寸调整为1 280×384.22个序列中只有前11个序列提供了每个图片对应的真实姿态数据,部分场景中含有动态移动的物体以及明暗的显著变换,部分场景中汽车行驶速度高达90 km/h. 总体信息如表 2所示.
考虑到训练集和验证集的图片种类划分,本文使用08以前的序列对ALC-VO模型进行训练,并选择一定数量的数据进行验证,然后使用08、09、10序列对ALC-VO模型进行测试. 训练集和验证集的所有图片均由双目相机中的左相机所采集.
2.2 训练过程
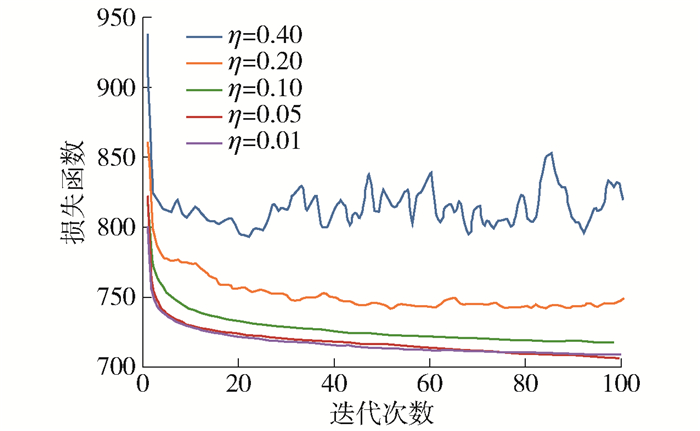
首先,将讨论影响模型的超参数学习率η,Loss曲线如图 4所示. 本实验中η被设置为[0.40, 0.20, 0.10, 0.05, 0.01],Loss曲线刚开始下降得很快,后面就是震荡和随机抖动;最终使用η=0.40 Loss曲线震荡得非常明显,这样的参数没办法使得网络获得较好的性能. 同样如果η值太小(如0.01),那么收敛速度可能会太慢,需要更长的时间来得到较好的网络参数.
2.3 误差分析
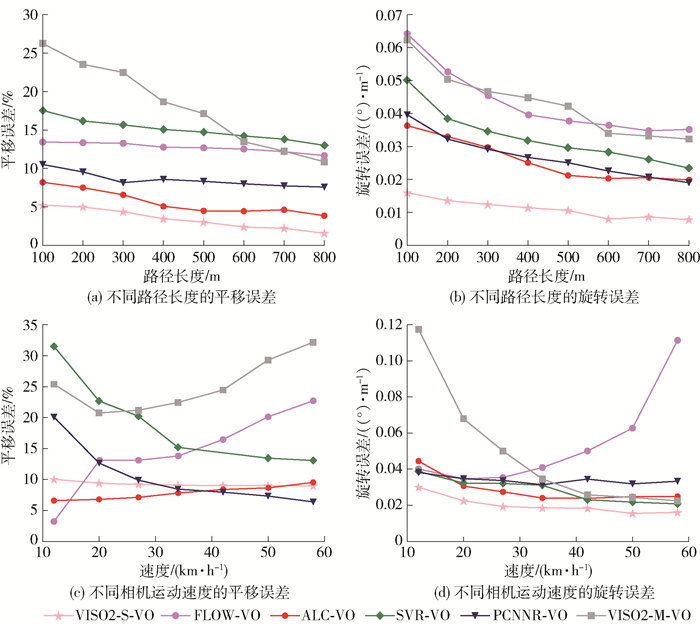
将训练好的ALC-VO模型在测试集序列08、09、10上进行测试,并与其他先进的VO系统进行比较,通过KITTI VO/SLAM官方的评价方式进行评测:路径长度为100~800 m,而且汽车速度不相同(不同场景中汽车的速度不相同),评价指标为平移误差和旋转误差的均方根误差(RMSE). 在误差中t为平移误差百分比,r为旋转误差,分别表示为
$$ t=\frac{s_{\mathrm{t}}-s_{\mathrm{p}}}{s_{\mathrm{t}}} $$ (8) $$ r=\frac{R_{\text {error }}}{s_{\mathrm{t}}} $$ (9) 式中:st为地面真实的轨迹总长度;sp为里程计预测的轨迹总长度;Rerror为总的旋转误差.
不同算法在测试集上的具体表现如表 3所示,表中各序列的位姿定量评价指标为不同路径长度的平均平移误差和平均旋转误差. 实验结果表明,本文算法要优于PCNN-VO、VISO2-Mono[17]、SVR-VO[18]、FLOW-VO、Zhou等[19]、Deep-VO-Feat[20]、CC[21]、SC-SFM Learner[22]算法,证明了本文模型的可行性. 基于光流的FLOW-VO也有良好的表现,这表明在运动估计中,基于神经网络的光流方法可行,用光流来表征图片的运动特征是一种较优的选择.
表 3 各方法平移和旋转误差Table 3. Translation and rotation errors of each method序列 ALC-VO 文献[19] Deep-VO-Feat CC SC-SFM Learner t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) 08 5.91 0.015 0 13.42 0.042 0 9.15 0.036 4 8.46 0.038 1 8.55 0.035 4 09 9.12 0.035 0 11.34 0.040 8 9.07 0.038 0 7.71 0.023 2 7.60 0.021 9 10 7.88 0.034 3 15.26 0.041 2 9.60 0.034 1 9.87 0.044 7 10.77 0.046 3 平均值 7.63 0.028 1 13.34 0.041 3 9.27 0.036 1 8.68 0.035 3 8.97 0.034 5 序列 VISO2-S-VO VISO2-M-VO PCNN-VO FLOW-VO SVR-VO t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) 08 5.65 0.012 7 19.39 0.039 3 7.60 0.018 7 9.98 0.054 4 14.44 0.030 0 09 8.80 0.033 6 9.26 0.027 9 6.75 0.025 2 12.64 0.080 4 8.70 0.026 6 10 7.56 0.032 1 27.55 0.040 9 21.23 0.040 5 11.65 0.072 8 18.81 0.026 5 平均值 7.33 0.026 1 18.73 0.036 6 11.86 0.028 2 11.42 0.069 2 13.98 0.028 0 VISO2-S-VO与VISO2-M-VO均为采用传统方式求解VO的算法,两者不同之处在于VISO2-M-VO为单目算法,VISO2-S-VO为双目算法. 为了对比传统方法的实验效果,将VISO2-S-VO与VISO2-M-VO在KITTI数据集的场景中进行测试. 如图 5所示,即为本文方法所估计的VO在不同路径长度和速度下的平移和旋转角度的平均RMSE. 可以看到本文所提出的方法比VISO2-M单目VO的效果要好,但是比VISO2-S-VO的定位精度要低. 从整体来看,除了双目的VISO2-S-VO,本文的模型都优于其余的单目算法. 但随着相机运动速度的增加,ALC-VO的误差有增大的趋势,原因主要是训练集中缺少运动速度较快的样本,因此网络在预测高速运动下平移和旋转信息时相对来说误差偏大.
2.4 轨迹可视化
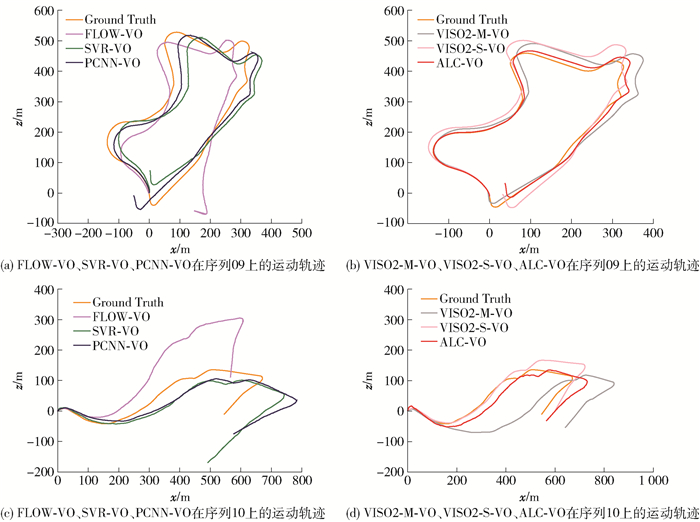
为了更好地进行定性分析,将ALC-VO、VISO2-S-VO、VISO2-M-VO、PCNN-VO、FLOW-VO、SVR-VO在序列09、10上估计的运动轨迹进行了可视化处理,如图 6所示. 图中由真实位姿数据产生的轨迹作为测量标准. 可以看出5种算法大致上都恢复出了真实运动轨迹的形状,而ALC-VO模型估计的轨迹要优于VISO2-M-VO、PCNN-VO、FLOW-VO、SVR-VO,更接近于真实轨迹. 但是ALC-VO的精度要略低于VISO2-S-VO. 原因一,VISO2-S-VO是双目算法,VISO2-S-VO可以通过左目相机和右目相机拍摄的2幅图片获取尺度信息,从而位姿估计更加准确;原因二,ALC-VO的训练样本不够多,没有达到网络最优的状态.
![]() 图 6 不同算法在序列09、10上生成的运动轨迹Figure 6. Motion trajectories generated by different algorithms on sequence 09 and 10
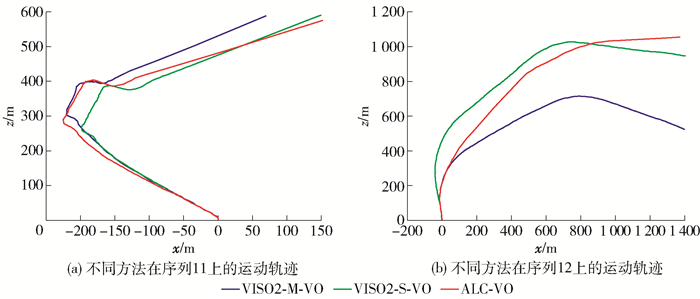
图 6 不同算法在序列09、10上生成的运动轨迹Figure 6. Motion trajectories generated by different algorithms on sequence 09 and 10另外,本文还在序列11、12上对ALC-VO模型行了测试,序列11、12没有提供真实位姿数据,且相机的速度也快于前面的序列,因此相邻图片间的相机运动幅度更加大,这将十分考验算法的性能. 图 7展示了不同算法估计的运动轨迹的可视化结果,因为缺少真实数据,所以使用VISO2-M-VO、VISO2-S-VO的运算结果与本文算法进行对比,并将VISO2-S-VO作为参考. 从图 7中可以看出相较于VISO2-M-VO方法,ALC-VO的运动轨迹更接近于VISO2-S-VO,这展现出了本文提出的模型有较好的泛化能力.
![]() 图 7 不同算法在序列11、12上生成的运动轨迹Figure 7. Motion trajectories generated by different algorithms on sequence 11 and 12
图 7 不同算法在序列11、12上生成的运动轨迹Figure 7. Motion trajectories generated by different algorithms on sequence 11 and 122.5 消融实验
另外,为了验证注意力结构和LSTM网络结构对算法的提升效果,本文在KITTI数据集中进行了不同模块的训练以及测试. 实验结果如表 4所示,CNN算法的平移误差为12.32%,旋转误差为0.046 0°/m,将注意力结构单独嵌入到CNN中,平移误差降低至8.25%,旋转误差降低至0.035 0°/m,验证了LSTM结构的有效性. 将LSTM结构单独嵌入到CNN算法中,平移误差降低至8.83%,旋转误差降低至0.037 0°/m,验证了本文提出算法整体结构的有效性. 将2个结构同时嵌入到CNN算法中,平移误差降低至7.63%,旋转误差降低至0.028 1°/m,验证了本文算法的有效性.
表 4 不同网络结构的误差结果Table 4. Error results of different network structures序列 ALC-VO CNN+LSTM CNN+注意力 CNN t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) 平均值 7.63 0.028 1 8.83 0.037 0 8.25 0.035 0 12.32 0.046 0 2.6 运行速度对比
最后,检测算法所消耗的时间,本文对不同算法进行了对比,具体内容如表 5所示. 从整体上看本文算法所消耗的时间低于SVR-VO和PCNN-VO,但是高于FLOW-VO. 在特征提取的环节本文参考了FLOW-VO的网络结构,同时本文模型增加注意力模块及长短时记忆网络,从而增加了算法的计算量,导致计算时间的增加. 通过定量分析,ALC-VO较FLOW-VO在精度上提高了33.2%,同时时间上增加了25.7%.
表 5 不同方法的时间对比结果Table 5. Time comparison results of different methods方法 每帧执行时间/ms SVR-VO 333 PCNN-VO 302 FLOW-VO 105 ALC-VO 132 3. 结论
1) 本文提出了一种基于注意力和LSTM时序建模的单目视觉里程计算法,通过融合CNN、注意力、LSTM构建整体的网络,并利用一个对称的镜像网络,使其能够学习图片之间的深层的几何运动信息.
2) 所提出的算法相较于传统的视觉里程计算法,具有更好的准确性,同时摒弃了相机标定特征提取特征匹配等复杂过程,在不同场景下更易于实现,具有较高的稳定性.
3) 与其他算法相比,本文算法不仅对视角和光线变化更鲁棒,而且在位姿估计误差的精度方面有显著的提升. 不足之处是,所提出的网络模型有较多参数,时间复杂度并非最优. 因此,未来的工作将通过知识蒸馏的方式减少网络参数,对本文算法的运行速度进行优化.
-
![]()
图 6 不同算法在序列09、10上生成的运动轨迹
Figure 6. Motion trajectories generated by different algorithms on sequence 09 and 10
![]()
图 7 不同算法在序列11、12上生成的运动轨迹
Figure 7. Motion trajectories generated by different algorithms on sequence 11 and 12
表 1 CNN的各层参数
Table 1 Parameters of each layer of CNN
网络层 卷积核 步长 填充 通道数量 Conv_1 7×7 2 3 64 Conv_2 5×5 2 3 128 Conv_3 5×5 2 2 256 Conv_4 5×5 2 2 256 Conv_5 3×3 1 1 512 Conv_6 3×3 2 1 512 Conv_7 3×3 1 1 512 Conv_8 3×3 2 1 512  下载: 导出CSV
下载: 导出CSV
表 2 KITTI数据集中序列00-10信息
Table 2 Information of sequences 00-10 in KITTI
序列 图片总数 图片尺寸 总长度/m 00 4 541 1 241×376 3 724 01 1 101 1 241×376 2 453 02 4 661 1 241×376 5 067 03 801 1 241×376 560 04 271 1 226×370 393 05 2 761 1 226×370 2 205 06 1 101 1 226×370 1 232 07 1 101 1 226×370 694 08 4 071 1 226×370 3 222 09 1 591 1 226×370 1 705 10 1 201 1 226×370 919
下载: 导出CSV
表 3 各方法平移和旋转误差
Table 3 Translation and rotation errors of each method
序列 ALC-VO 文献[19] Deep-VO-Feat CC SC-SFM Learner t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) 08 5.91 0.015 0 13.42 0.042 0 9.15 0.036 4 8.46 0.038 1 8.55 0.035 4 09 9.12 0.035 0 11.34 0.040 8 9.07 0.038 0 7.71 0.023 2 7.60 0.021 9 10 7.88 0.034 3 15.26 0.041 2 9.60 0.034 1 9.87 0.044 7 10.77 0.046 3 平均值 7.63 0.028 1 13.34 0.041 3 9.27 0.036 1 8.68 0.035 3 8.97 0.034 5 序列 VISO2-S-VO VISO2-M-VO PCNN-VO FLOW-VO SVR-VO t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) 08 5.65 0.012 7 19.39 0.039 3 7.60 0.018 7 9.98 0.054 4 14.44 0.030 0 09 8.80 0.033 6 9.26 0.027 9 6.75 0.025 2 12.64 0.080 4 8.70 0.026 6 10 7.56 0.032 1 27.55 0.040 9 21.23 0.040 5 11.65 0.072 8 18.81 0.026 5 平均值 7.33 0.026 1 18.73 0.036 6 11.86 0.028 2 11.42 0.069 2 13.98 0.028 0
下载: 导出CSV
表 4 不同网络结构的误差结果
Table 4 Error results of different network structures
序列 ALC-VO CNN+LSTM CNN+注意力 CNN t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) t/% r/((°)·m-1) 平均值 7.63 0.028 1 8.83 0.037 0 8.25 0.035 0 12.32 0.046 0
下载: 导出CSV
表 5 不同方法的时间对比结果
Table 5 Time comparison results of different methods
方法 每帧执行时间/ms SVR-VO 333 PCNN-VO 302 FLOW-VO 105 ALC-VO 132
下载: 导出CSV
-
[1] SCARAMUZZA D, FRAUNDORFER F. Visual odometry: tutorial[J]. IEEE Robotics & Automation Magazine, 2011, 18(4): 80-92. http://smartsearch.nstl.gov.cn/paper_detail.html?id=589206acabae2e5d23f6258e792b043f
[2] 张亮, 蒋荣欣, 陈耀武. 移动机器人在未知环境下的同步定位与地图重建方法[J]. 控制与决策, 2010, 25(4): 515-520. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201004008.htm ZHANG L, JIANG R X, CHEN Y W. Simultaneous localization and map reconstruction of mobile robot in unknown environment[J]. Control and Decision, 2010, 25(4): 515-520. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201004008.htm
[3] DAVISON A J, REID I D, MOLTON N D, et al. Mono-SLAM: real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. doi: 10.1109/TPAMI.2007.1049
[4] KLEIN G, MURRAY D. Parallel tracking and mapping for small AR workspaces[C]//Proc of the 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway: IEEE, 2007: 225-234.
[5] NEWCOMBE R A, LOVEGROVE S J, DAVISON A J. DTAM: dense tracking and mapping in real-time[C]//Proc of IEEE International Conference on Computer Vision. Piscataway: IEEE, 2011: 2320-2327.
[6] ENGEL J, SCHÖPS T, CREMERS D. LSD-SLAM: large-scale direct monocular SLAM[C]//Proc of Computer Vision-ECCV. Berlin: Springer, 2014: 834-849.
[7] KARPATHY A, TODERICI G, SHETTY S, et al. Large-scale video classification with convolutional neural networks[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 1725-1732.
[8] REN S, HE K, GIRSHICK R, et al. Faster r-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017, 39(6): 1137-1149. doi: 10.1109/TPAMI.2016.2577031
[9] ROBERTS R, NGUYEN H, KRISHNAMURTHI K, et al. Memory-based learning for visua odometry[C]//2008 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2008: 47-52.
[10] KONDA K R, MEMISEVIC R. Learning visual odometry with a convolutional network[C]//Proceedings of International Conference on Computer Vision Theory and Applications. New York: ACM, 2015: 486-490.
[11] COSTANTE G, MANCINI M, VALIGI P A, et al. Exploring representation learning with cnns for frame-to-frame ego-motion estimation[J]. IEEE Robotics and Automation Letters, 2015, 1(1): 18-25. http://ieeexplore.ieee.org/document/7347378/
[12] MULLER P, SAVAKIS A. Flow odometry: an optical flow and deep learning-based approach to visual odometry[C]//2017 IEEE Winter Conference on Applications of Computer Vision (WACV). Piscataway: IEEE, 2017: 624-631.
[13] DONAHUE J, HENDRICKS L A, GUADARRAMA S, et al. Long-term recurrent convolutional networks for visual recognition and description[C]//IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 2625-2634.
[14] IOFFE S, SZEGEDY C. Batch normalization: accelerating deep network training by reducing internal covariate shift[J]. arXiv preprint arXiv, 2015: 1502.03167.
[15] SHI X, CHEN Z, WANG H, et al. Convolutional LSTM network: a machine learning approach for precipitation nowcasting[J]. arXiv preprint arXiv, 2015: 1506.04214.
[16] GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The kitti vision benchmark suite[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361.
[17] GEIGER A, ZIEGLER J, STILLER C. Stereoscan: dense 3d reconstruction in real-time[C]//2011 IEEE Intelligent Vehicles Symposium (IV). Piscataway: IEEE, 2011: 963-968.
[18] CIARFUGLIA T, COSTANTE G, VALIGI P, et al. Evaluation of non-geometric methods for visual odometry[J]. Robotics and Autonomous Systems, 2014, 62(12): 1717-1730. doi: 10.1016/j.robot.2014.08.001
[19] ZHOU T, BROWN M, SNAVELY N, et al. Unsupervised learning of depth and ego-motion from video[C]//IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 1851-1858.
[20] ZHAN H G, GARG R, CHAMARA S, et al. Unsupervised learning of monocular depth estimation and visual odometry with deep feature reconstruction[C]//IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 340-349.
[21] RANJAN J, JAMPANI V, BALLES L, et al. Competitive collaboration: joint unsupervised learning of depth, camera motion, optical flow and motion segmentation[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 12240-12249.
[22] BIAN J W, LI Z C, WANG N Y, et al. Unsupervised scale-consistent depth and ego-motion learning from monocular video[J]. ArXiv Preprint ArXiv, 2019: 1908.10553.
-
期刊类型引用(1)
1. 李鹏,黄鹏,凌智琛,邓甘霖. 无监督深度学习单目视觉里程计研究. 导航定位与授时. 2023(02): 74-81 .  百度学术
百度学术
其他类型引用(0)
计量
- 文章访问数: 0
- HTML全文浏览量: 0
- PDF下载量: 0
- 被引次数: 1
