
Design and Analysis of Tertiary Mirror System of a Thirty-Meter Telescope in Conceptual Phase
-
摘要:
为保证30 m望远镜(thirty-meter telescope,TMT)聚集的光线顺利进入各个终端设备,设计了一套适用于30 m望远镜的精密跟踪指向三镜系统.该系统包含有基于Whiffle-tree原理的三镜支撑系统设计和采用地平式结构的跟踪指向系统设计2两个部分.通过参数化建模手段,在ANSYS中建立了系统的详细模型,联合Matlab完成了98个主要工况下的静力学分析后,对镜面面形结果以及结构变形情况进行了统计总结.最后将面形误差引入到ZEMAX中,分析了三镜面形变化对光学调制传递函数的影响.结果表明:98个工况下三镜位置与理想位置最大偏差为1.28 mm,系统的第一阶谐振频率为15.1 Hz,各工况下三镜面形精度均满足指标要求.三镜面形误差对系统MTF影响较大,但通过主镜主动光学校正后可以明显提高成像质量,满足使用要求.通过分析可知,该方案能够满足30 m望远镜项目的需求.探索与解决巨型望远镜的这些技术问题能够大大提高中国在超大口径光学望远镜上的设计和制造能力,并为建设中国下一代巨型望远镜积累丰富的经验.
Abstract:A giant steerable tertiary mirror system was promoted to ensure that the light gathered by the thirty-meter telescope (TMT) goes into the terminal equipment. This system contains two main assemblies:the mirror cell assembly and the positioner assembly. In the mirror cell assembly, both the axial support system and the lateral support system used the whiffle-tree structure. In the positioner assembly, an azimuth-altitude structure was used to solve the pointing problem. A detailed systemic parametric model was constructed in ANSYS. With the help of MATLAB and ANSYS, analysis under 98 main work conditions was carried out to verify the M3S performance. Some statistical methods were applied to process the simulation results. Then, the surface figure error was induced into the optical analysis. Result shows that the maximum displacement is up to 1.28 mm with a first modal frequency of 15.1 Hz. In optical analysis, the surface figure error degrades the modulation transfer function (MTF), however, the effect can be declined by active optics correction. Analysis results show that the proposed design can meet the requirements of the thirty-meter telescope project. Exploration of giant telescopes can significantly improve our country capabilities in telescope design and manufacture and accumulate experience for next generation of giant telescope construction.
-
为了达到深空探测的目的以及高分辨率成像的需求,射电望远镜和光学望远镜正朝着愈来愈大的方向发展.口径的增大使望远镜成本呈现指数级的增长.为确保项目的顺利进行,优秀的设计及详尽的分析尤为必要. 30 m望远镜(thirty-meter telescope,TMT)项目作为一个国际合作项目,长春光学精密机械与物理研究所承担了其三镜系统设计、加工制造以及装调的工作. TMT工作时,由于终端设备位于两侧奈氏平台上,经三镜反射后的光线不一定与望远镜俯仰轴轴线重合[1-2].所以三镜系统的位姿随望远镜姿态和仪器位置的变化而不断变化.因此,保证各个姿态下三镜的面形精度与精确指向给设计者带来的巨大挑战[3-4].
本文从设计出发,提出了一套可行的设计方案.优先介绍了三镜支撑系统的优化与设计.然后利用联合仿真的方法分析了98个工况下的变形及面形情况.最后将最差工况下的面形代入到ZEMAX中,研究三镜面形误差在主镜主动光学校正后对系统成像产生的影响.
1. 三镜系统设计方案
三镜在望远镜中的位姿伴随望远镜姿态和仪器位置的变化而不断变化.这对三镜系统的支撑设计和跟踪架设计提出了严苛挑战.
1.1 三镜支撑系统
TMT三镜为椭圆形平面镜,设计厚度为100 mm,机械尺寸3 594 mm×2 536 mm,选用低膨胀系数的微晶玻璃作为坯料加工成型,总质量1.8 t[5].为避免主动光学系统的相互干扰,TMT系统工程要求三镜系统采用被动支撑形式.为满足这一要求,基于运动学原理,本文创新性的将Whiffle-tree结构同时使用在底支撑与侧支撑系统中[4-7].根据光学设计要求,望远镜成像工作过程中,三镜面形的斜率均方根(SlopeRMS)不大于1 μrad.
1.2 指向跟踪系统
为满足2维调整需要,三镜指向跟踪系统选择了地平式望远镜的结构形式.为区别于望远镜自身,将三镜系统方位轴命名为rotator,水平轴命名为tilt.在天顶角0°~65°的工作范围内,位于+X奈氏平台上的设备所对应的两轴旋转角度可通过计算得到.
其中,rotator角[5]可表示为
$$ \begin{array}{l} \mathit{\Omega = }{\rm{arctan}}\left( {\left( {\cos \;\xi \cos \;\alpha \sin \;\beta + } \right.} \right.\\ \left. {\left. {\;\;\;\;\;\;\sin \;\xi \sin \;\alpha } \right){\rm{/}}\left( {\cos \;\alpha \cos \beta } \right)} \right) \end{array} $$ (1) tilt角[5]可表示为
$$ \begin{array}{l} \mathit{\Phi = }\frac{1}{2}{\rm{arccos}}\left( {-\sin \;\xi \cos \;\alpha \sin \;\beta + } \right.\\ \left. {\;\;\;\;\;\;\cos \;\xi \sin \;\alpha } \right) \end{array} $$ (2) 式中:ξ为天顶角;α称为仪器俯仰角;β称为仪器方位角.其中后两者用来确定设备在望远镜上的位置.
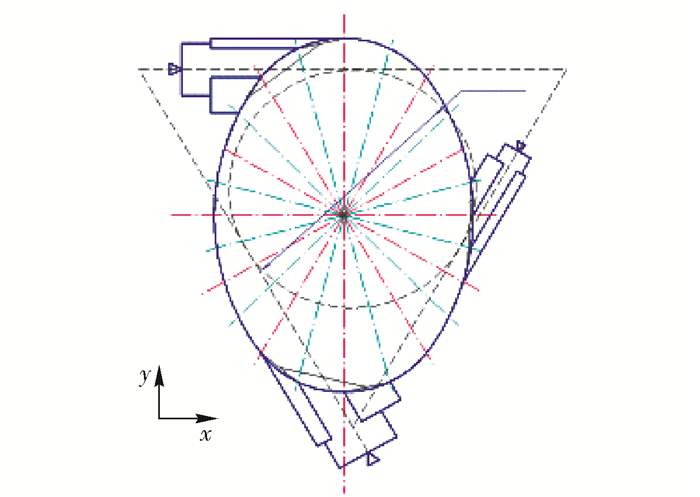
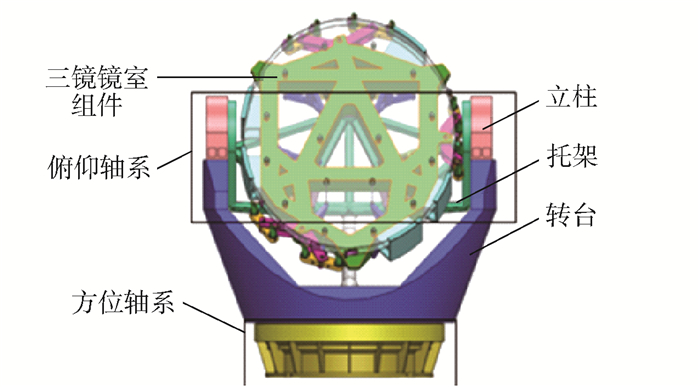
指向跟踪系统与地平式望远镜类似,但又有所不同.指向跟踪系统的水平轴系工况比后者复杂许多,所以本文首次将两端固支的设计方法应用到了水平轴系的设计中.另外传统地平式望远镜中,俯仰轴是经过严格配平的[4, 8].但在TMT三镜系统中,三镜椭圆镜面的短轴为Tilt的转动轴线,相应结构都位于镜面下方,所以Tilt轴是一个严重偏心的结构,这种结构给设计带来了很大的困难,如图 1所示.为此,tilt轴摒弃了传统直驱方法,采用了直线促动器构成的四连杆驱动方式.
2. 三镜支撑系统设计与优化
2.1 底支撑位置优化设计
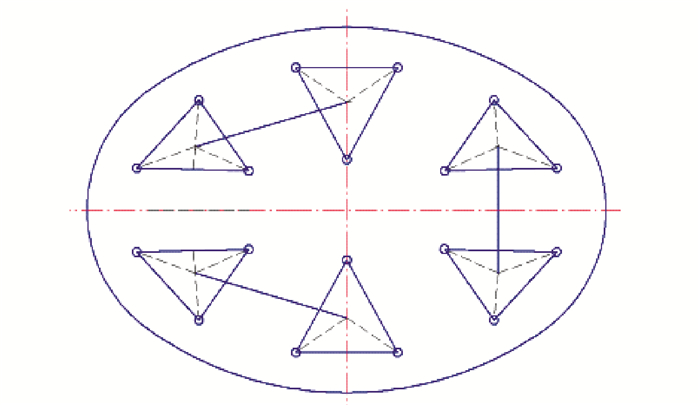
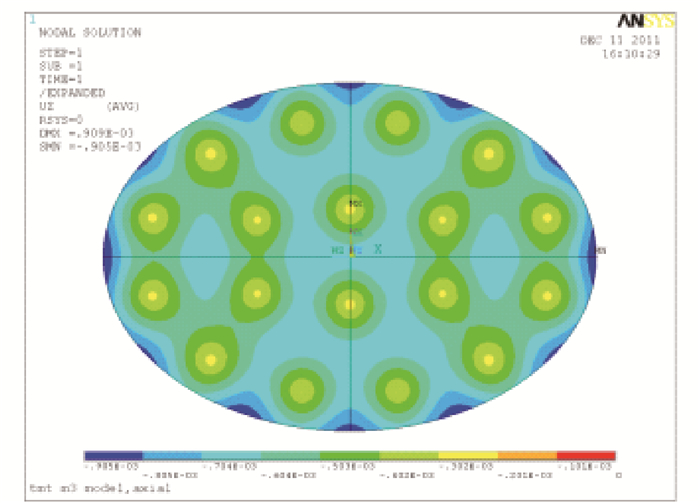
根据TMT系统工程设计,望远镜工作过程中,镜面的SlopeRMS达到1 μrad即可以满足使用要求,此时RMS大约为波长的1/6(632.5 nm).经过前期论证设计,最终采用18点whiffle-tree的被动支撑方式.这种支撑方式符合运动学原理,且结构简单,无需电控系统,对视宁度的影响小,对装调误差不敏感,可靠性高.支撑点的分布情况如图 2所示,这种分布下支撑点关于三镜长轴对称,有利于后期结构设计,支撑点的位置以SlopeRMS为优化目标函数在Ansys中进行优化[9-10],优化后的面形结果P-V= 581.51 nm,RMS=108.23 nm,SlopeRMS=1.032 μrad,支撑点最优时三镜的镜面面形图如图 3所示.当然,这属于三镜镜室系统的最差工况,但并不包含于望远镜工作状况中.
2.2 侧支撑位置优化设计
侧支撑是基于运动学原理的被动支撑方式,12个支撑点位于三镜的侧面,每4个支撑点分成1组,3组支撑点互成120°,图 4为侧支撑的原理图,每组内的4个支撑点通过杠杆结构连接到三镜室,因此每组的4个侧支撑力相等,这种支撑方式可以理解为变异的whiffle-tree结构.由于三镜为平面镜,因此只会在支撑点附近引起局部的泊松效应,这对镜面面形是非常有利的.另外,如图 4所示,3组侧支撑构成的等边三角型内切圆面积越大,系统的旋转模态刚度越大,这也是本设计的亮点之一.
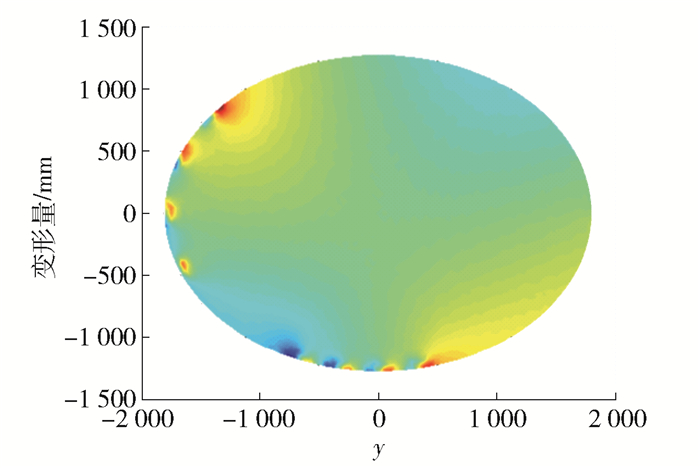
当施加y方向重力时,镜面z向变形云图如图 5所示,此时P-V=145.6 nm,RMS =15.0 nm,SlopeRMS=0.109 6 μrad.当施加x方向重力时,P-V=133.6 nm, RMS=13.7 nm, SlopeRMS=0.098 μrad.
2.3 支撑系统调整设计
Whiffletree结构是一种基于力矩自平衡原理的结构形式.因此,不仅要考虑支撑力引入的力矩平衡,同样要考虑支撑结构本身的平衡.本设计中,由于支撑结构不完全对称,因此需要引入少量配重来实现Whiffletree结构的自平衡.后期分析证明,施加一定配重校正后,可以复现三镜支撑点位置优化时的面形,满足了设计要求.侧支撑系统设计时需要考虑谐振频率的影响,故合理地优化whiffletree侧支撑拓扑形式尤为重要.总之,Kinematic原理的底支撑和侧支撑方案使三镜既不过约束也不欠约束,使各项指标均达到了设计要求.
3. 三镜系统级有限元仿真分析
3.1 系统级静力学分析
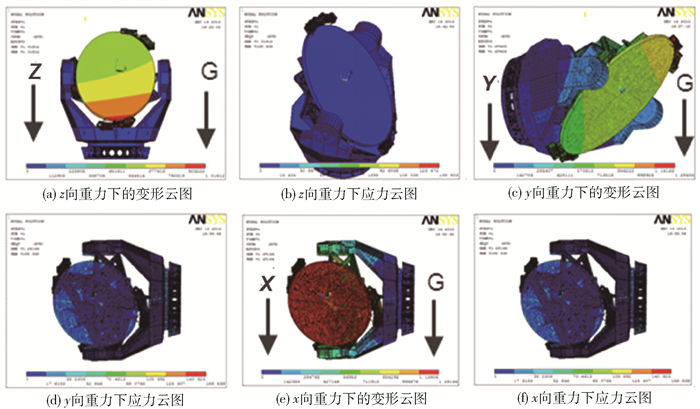
三镜系统在观测过程中Rotator和Tilt的轴线与重力夹角时刻变化.因此,首先选取重力沿x、y和z三个方向的工况进行仿真.重力变形及应力分布云图如图 6所示,其中系统最大变形量出现在重力沿x轴时,大小约为1.28 mm;同时侧支撑杆的应力也达到相应幅值,可达158 MPa.最大变形量和最大应力如表 1所示.
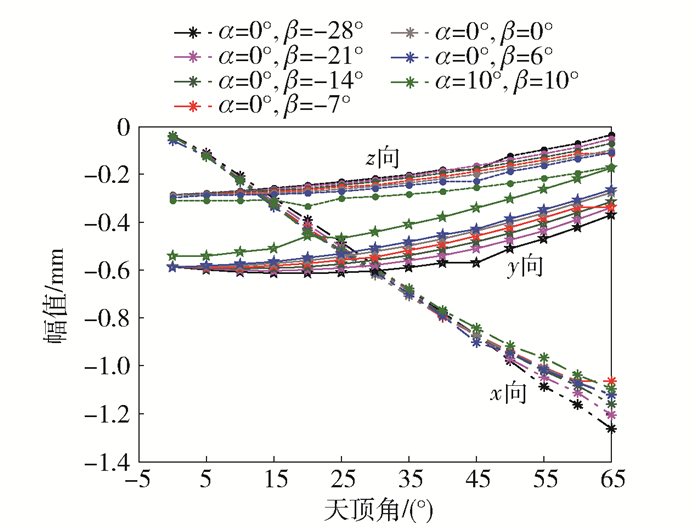
表 1 3种主要工况下最大变形和最大应力Table 1. Maximum displacement and stress of three main cases重力方向 最大变形/mm 最大应力/MPa x 1.28 158.2 y 1.27 136.6 z 1.02 138.9 为详细研究不同工况下三镜跟踪指向系统引入的误差以及面形变化情况,使用ANSYS建立了详尽的系统级参数化模型,并借助于MATLAB与ANSYS联合仿真的方法对7个主要工作位置,共98个工况进行了仿真分析[11-12].三镜随天顶角变化沿x、y、z向的变形曲线如图 7所示,三镜镜面RMS、SlopeRMS以及重力作用下三镜系统弯沉带来的指向误差随天顶角及仪器方位角的变化如图 8所示.
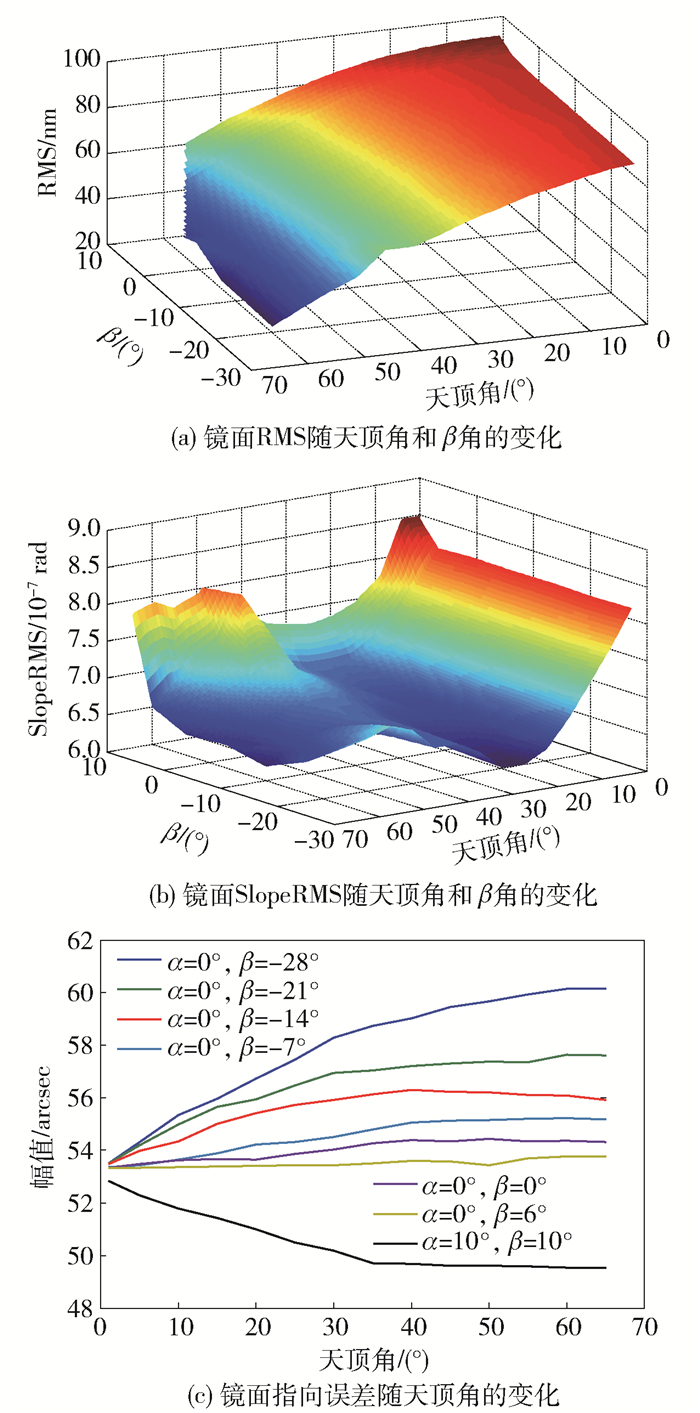
![]() 图 8 三镜面形精度及指向误差随天顶角和仪器方位角的变化Figure 8. Surface figure and pointing error as a function of zenith angle and β
图 8 三镜面形精度及指向误差随天顶角和仪器方位角的变化Figure 8. Surface figure and pointing error as a function of zenith angle and β如图 8所示,三镜面形精度RMS值随天顶角增大而减小,随β的增大而增大. SlopeRMS值随天顶角变化较为复杂,但其随β的增大明显增大,最大值约为0.85 μrad[2],满足TMT面形要求.两者变化趋势不尽相同,也证明了SlopeRMS是一个有别于RMS的光学元件面形评价指标.另外,由于弯沉引起的指向误差最大约为62″.但后期这一误差可以通过位置、相位对准系统(alignment and phasing system,APS)测量后制作Error-Mapping进行校正.
3.2 模态分析
为提高系统的响应速度和增加系统的控制带宽,TMT要求三镜系统的第一阶谐振频率不低于15 Hz.在有限元模型中,固定三镜系统底部,并进行模态分析,模态频率及振型如表 2所示.三镜系统的第一阶谐振频率为15.1 Hz,满足系统刚度要求.
表 2 模态分析结果Table 2. Modal analysis results模态 频率/Hz 模态振型 1 15.10 左右摇动 2 17.31 三镜关于短轴弯曲 3 23.29 促动器摆动 4 23.46 绕俯仰轴转动 5 24.88 三镜绕z轴转动 4. 基于有限元结果的光学系统分析
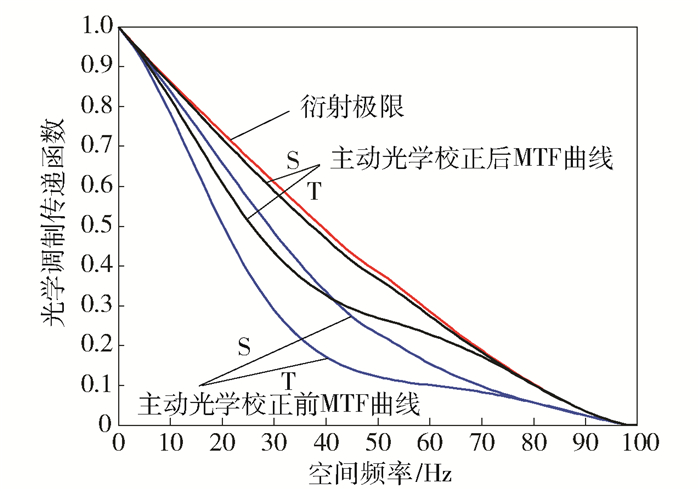
TMT光学系统是一个典型的R-C系统,主要光学元件为主镜、次镜与三镜.其中,主镜由492块对角长度为1.44 m的六边形子镜拼接而成;次镜为口径3.02 m的双曲面镜;三镜为长轴3.594 m,短轴2.536 m的椭圆形平面镜.该望远镜采用主动光学技术,通过主镜的主动光学校正系统的像差.根据相应文件要求,主镜可以校正三镜的低阶离焦和象散.因此,将Zenith=0, α=0°,β=-28°处的面形误差及去除前六阶Fringe Zernike项后的误差,分别代入到ZEMAX模型中,分析三镜误差对系统成像的影响.
如图 9所示,红色曲线代表了光学系统在衍射极限下的MTF曲线;蓝色线对表示光学系统引入三镜面形误差后系统的MTF曲线(其中,T、S分别表示子午、弧矢方向);黑色线对表示主动光学校正低阶像差后系统的MTF曲线.分析可知,三镜面形误差的引入对系统MTF影响较为显著.但通过主镜主动光学校正,可将这种影响大大降低.
5. 结论
1) 将Whiffle-tree结构同时应用在底支撑和侧支撑系统上,保证了三镜在各种工况下的面形精度.
2) 水平轴系采用两端固支的结构方案,有效保证了系统的刚度.
3) 借助ANSYS和Matlab联合仿真,对7个工作位置的98个工况进行了静力学的分析,并对相应的面形结果和结构变形进行了统计分析.结果表明,各种工况下三镜的面形的SlopeRMS最大不超过0.85 μrad,满足设计需要;结构的变形量在x向最大为1.28 mm,y向最大为0.64 mm,z向最大为0.32 mm;光轴在重力影响下大约偏转62″.
4) 结合ZEMAX软件,分析了主动光学校正前后系统的光学调制传递函数变化,证明了通过主镜主动光学校正后,成像质量能够满足系统要求.
-
![]()
图 8 三镜面形精度及指向误差随天顶角和仪器方位角的变化
Figure 8. Surface figure and pointing error as a function of zenith angle and β
表 1 3种主要工况下最大变形和最大应力
Table 1 Maximum displacement and stress of three main cases
重力方向 最大变形/mm 最大应力/MPa x 1.28 158.2 y 1.27 136.6 z 1.02 138.9  下载: 导出CSV
下载: 导出CSV
表 2 模态分析结果
Table 2 Modal analysis results
模态 频率/Hz 模态振型 1 15.10 左右摇动 2 17.31 三镜关于短轴弯曲 3 23.29 促动器摆动 4 23.46 绕俯仰轴转动 5 24.88 三镜绕z轴转动
下载: 导出CSV
-
[1] 杨飞, 刘国军, 赵宏超, 等. 30 m望远镜三镜系统刚度分配与分析[J].光学精密工程, 2016, 24(1):152-159. http://www.eope.net/EN/Y2016/V24/I1/152 YANG F, LIU G J, ZHAO H C, et al. Stiffness allocation and analysis of TMT M3S[J]. Optics and Precision Engineering, 2016, 24(1):152-159. (in Chinse) http://www.eope.net/EN/Y2016/V24/I1/152
[2] HAGUENAUER P, BERGER J P, ROUSSELET-PERRAUT K, et al. Integrated optics for astronomical interferometry-Ⅲ. Optical validation of a planar optics two-telescope beam combiner[J]. Applied Optics, 2000, 39(13):2130-2139. doi: 10.1364/AO.39.002130
[3] 曹毅, 刘凯, 单春成, 等.抗拉柔性铰链的理论建模及有限元分析[J].光学精密工程, 2016, 24(1):119-125. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_gxjmgc201601016 CAO Y, LIU K, SHAN C C, et al. Theory modeling and finite element analysis of tensile flexure hinge[J]. Editorial Office of Optics and Precision Engineering, 2016, 24(1):119-125. (in Chinse) http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_gxjmgc201601016
[4] SANDERS G H. The thirty meter telescope (TMT):an international observatory[J]. Journal of Astrophysics and Astronomy, 2013, 34(2):81-86. doi: 10.1007/s12036-013-9169-5
[5] OTÁROLA A, TRAVOUILLON T, SCHÖCK M, et al. Thirty meter telescope site testing X:precipitable water vapor[J]. Publications of the Astronomical Society of the Pacific, 2010, 122(890):470-484. doi: 10.1086/651582
[6] 王富国, 杨飞, 赵宏超, 等. TMT望远镜三镜系统的研究进展[J].中国光学, 2013, 10(6):643-651. http://d.wanfangdata.com.cn/Periodical_zggxyyygxwz201305004.aspx WANG F G, YANG F, ZHAO H C, et al. Progress in TMT M3 system[J]. Chinese optics, 2013, 10(6):643-651. (in Chinese) http://d.wanfangdata.com.cn/Periodical_zggxyyygxwz201305004.aspx
[7] 张景旭.地基大口径望远镜系统结构技术综述[J].中国光学, 2012, 5(4):327-336. http://d.wanfangdata.com.cn/Periodical_zggxyyygxwz201204004.aspx ZHANG J X. Overview of structure of technologies of large aperture ground based telescope[J]. Chinese Optics, 2012, 5(4):327-336. (in Chinese) http://d.wanfangdata.com.cn/Periodical_zggxyyygxwz201204004.aspx
[8] 张丽敏, 王富国, 安其昌, 等. Bipod柔性结构在小型反射镜支撑中的应用[J].光学精密工程, 2015, 23(2):438-443. http://www.eope.net/gxjmgc/CN/abstract/abstract15681.shtml ZHANG L M, WANG F G, AN Q C, et al. Application of Bipod to supporting structure of minitype reflector[J]. Optics and Precision Engineering, 2015, 23(2):438-443. (in Chinese) http://www.eope.net/gxjmgc/CN/abstract/abstract15681.shtml
[9] 邵亮, 吴小霞, 陈宝刚, 等. SiC轻量化主镜的被动支撑系统[J].光学精密工程, 2015, 23(5):1380-1386 http://www.opticsjournal.net/Abstract.htm?id=OJ150611000085IeKhNk SHAO L, WU X X, CHEN B G, et al. Passive support system of light-weighted SiC primary mirror[J]. Optics and Precision Engineering, 2015, 23(5):1380-1386. (in Chinese) http://www.opticsjournal.net/Abstract.htm?id=OJ150611000085IeKhNk
[10] 赵宏超, 张景旭, 杨飞, 等.预紧式八翼梁次镜支撑结构的动力学分析[J].光学精密工程, 2013, 21(5):1199-1204. http://www.cqvip.com/QK/92835A/201305/45947720.html ZHAO H C, ZHANG J X, YANG F, et al. Preloading eight-vane spider for supporting structure of secondary mirror[J]. Optics and Precision Engineering, 2013, 21(5):1199-1204. (in Chinese) http://www.cqvip.com/QK/92835A/201305/45947720.html
[11] KWON Y W, BANG H. The finite element method using MATLAB[M]. Boca Raton:CRC press, 2000:210-310
[12] COOK R D. Concepts and applications of finite element analysis[M]. Hoboken:John Wiley & Sons, 2007:345-400.
-
期刊类型引用(0)
其他类型引用(1)
计量
- 文章访问数: 161
- HTML全文浏览量: 5
- PDF下载量: 51
- 被引次数: 1
